
Chwytak (robotyka)
i.jpg)
Chwytak – jest to oprzyrządowanie technologiczne manipulatorów robotów przeznaczone do manipulowania przedmiotami. Zadaniem tych narzędzi jest uchwycenie detalu, utrzymanie go podczas transportu oraz jego zwolnienie w miejscu docelowym.
Budowa chwytaka
[edytuj | edytuj kod]Chwytaki składają się z zespołu napędowego, przeniesienia napędu i końcówek chwytnych. Kształt i parametry poszczególnych zespołów zależą od materiału, kształtu detalu, środowiska pracy oraz zastosowania.
Zadania chwytaka
[edytuj | edytuj kod]- uchwycenie manipulowanego przedmiotu z zapewnieniem mu właściwej orientacji
- utrzymanie przedmiotu pomimo działających sił zewnętrznych i przyspieszeń transportowych
- pozostawienie przedmiotu we właściwej orientacji w miejscu przeznaczenia
Podział chwytaków
[edytuj | edytuj kod]- Ze względu na budowę:
- napędu
- mechaniczny
- pneumatyczny
- hydrauliczny
- elektromagnetyczny
- adhezyjny
- układu przeniesienia napędu
- nożycowy
- szczypcowy
- imadłowy
- opasujący
- napędu
-
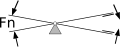 Nożycowy
Nożycowy -
 Szczypcowy
Szczypcowy -
 Imadłowy
Imadłowy -
 Opasujący
Opasujący



- układu wykonawczego
- dwuszczękowy
- trójszczękowy
- wieloszczękowy
- inny
- z końcówkami:
- sztywnymi
- sprężystymi
- elastycznymi
- Ze względu na sposób trzymania detalu:
- kształtowe
- siłowe
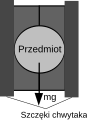
- siłowo-kształtowe
-
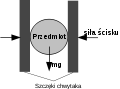 Siłowe
Siłowe -
 Kształtowe
Kształtowe -
 Siłowo-kształtowe
Siłowo-kształtowe



- Ze względu na sposób mocowania chwytaka:
- ręczny
- automatyczny (z adapterem)
Zobacz też
[edytuj | edytuj kod]Bibliografia
[edytuj | edytuj kod]- Gabriel Kost, Podstawy budowy robotów, Wydaw. PŚ, 1996, OCLC 835654397 [dostęp 2020-08-19].
- Ryszard Zdanowicz, Podstawy robotyki : laboratorium z robotów przemysłowych, Wydaw. Politechniki Śląskiej, 2003, ISBN 83-7335-170-1, OCLC 749171385 [dostęp 2020-08-19].
- Ryszard Zdanowicz, Robotyzacja procesów technologicznych, wyd. 2, Gliwice: Wydaw. Politechniki Śląskiej, 2002, ISBN 83-7335-141-8, OCLC 749458378 [dostęp 2020-08-19].