Tożsamości trygonometryczne – podstawowe zależności pomiędzy funkcjami trygonometrycznymi.
Wzór

jest prawdziwy dla dowolnej liczby rzeczywistej (a nawet zespolonej, przy przyjęciu ogólniejszych definicji). Tożsamość ta uznawana jest za podstawową tożsamość trygonometryczną. Zwana często jedynką trygonometryczną bądź trygonometrycznym twierdzeniem Pitagorasa.
Istnieją również dwie inne wariacje tego wzoru:


Funkcje trygonometryczne są okresowe 

Definicje tangensa i cotangensa[edytuj | edytuj kod]



Przedstawienia przy pomocy funkcji cosinus[edytuj | edytuj kod]



Przedstawienia przy pomocy funkcji sinus[edytuj | edytuj kod]



Parzystość i nieparzystość funkcji trygonometrycznych[edytuj | edytuj kod]

Zależności pomiędzy funkcjami a kofunkcjami[edytuj | edytuj kod]
Równości
![{\displaystyle {\begin{aligned}&\sin x=\cos \left({\frac {\pi }{2}}-x\right)&&\cos x=\sin \left({\frac {\pi }{2}}-x\right)\\[.2em]&\operatorname {tg} x=\operatorname {ctg} \left({\frac {\pi }{2}}-x\right)&&\operatorname {ctg} x=\operatorname {tg} \left({\frac {\pi }{2}}-x\right)\\[.2em]&\sec x=\operatorname {cosec} \left({\frac {\pi }{2}}-x\right)&&\operatorname {cosec} x=\sec \left({\frac {\pi }{2}}-x\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfd95bdb88e651940e908933f83dcad199334479)
nazywa się związkami pomiędzy funkcjami a ich kofunkcjami. Kofunkcją sinusa jest cosinus, cosinusa sinus, tangensa cotangens itd.
Funkcje trygonometryczne można układać w pary według kofunkcji lub według odwrotności. Odwrotnością sinusa jest cosecans, cosinusa secans, tangensa cotangens (i oczywiście na odwrót):
![{\displaystyle {\begin{aligned}&\sin x={\frac {1}{\operatorname {cosec} x}}&&\operatorname {cosec} x={\frac {1}{\sin x}}\\[.5em]&\cos x={\frac {1}{\sec x}}&&\sec x={\frac {1}{\cos x}}\\[.5em]&\operatorname {tg} x={\frac {1}{\operatorname {ctg} x}}&&\operatorname {ctg} x={\frac {1}{\operatorname {tg} x}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c997a622134bd906219470948bb3121aa2633ce5)
Funkcje sumy i różnicy kątów[edytuj | edytuj kod]




Funkcje wielokrotności kątów[edytuj | edytuj kod]
Wzory na dwukrotność kąta otrzymuje się przez podstawienie  we wzorach na funkcje sumy kątów.
we wzorach na funkcje sumy kątów.












Ogólnie:
![{\displaystyle {\begin{aligned}\sin nx&=\sum _{i=0}^{\infty }(-1)^{i}\cdot {n \choose 2i+1}\cos ^{n-2i-1}x\sin ^{2i+1}x\\[2pt]&=\sum _{i=0}^{\lfloor {\frac {n}{2}}\rfloor }(-1)^{i}\cdot {n \choose 2i+1}\cos ^{n-2i-1}x\sin ^{2i+1}x\\&=n\cos ^{n-1}x\sin x-{n \choose 3}\cos ^{n-3}x\sin ^{3}x+{n \choose 5}\cos ^{n-5}x\sin ^{5}x-{n \choose 7}\cos ^{n-7}x\sin ^{7}x+\dots \end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/714e1218d101c47c2664961856dd7d3326ba7738)
![{\displaystyle {\begin{aligned}\cos nx&=\sum _{i=0}^{\infty }(-1)^{i}\cdot {n \choose 2i}\cos ^{n-2i}x\sin ^{2i}x\\[2pt]&=\sum _{i=0}^{\lfloor {\frac {n}{2}}\rfloor }(-1)^{i}\cdot {n \choose 2i}\cos ^{n-2i}x\sin ^{2i}x\\&=\cos ^{n}x-{n \choose 2}\cos ^{n-2}x\sin ^{2}x+{n \choose 4}\cos ^{n-4}x\sin ^{4}x-{n \choose 6}\cos ^{n-6}x\sin ^{6}x+\dots \end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3eb40d217ed38a880497203d0468cb9a544202f5)

































Funkcje trygonometryczne wyrażone przy pomocy tangensa połowy kąta[edytuj | edytuj kod]



Powyższe tożsamości znalazły zastosowanie w tzw. podstawieniu uniwersalnym, stosowanym przy obliczaniu całek typu  gdzie
gdzie  jest funkcją wymierną zmiennych
jest funkcją wymierną zmiennych  Stosuje się podstawienie:
Stosuje się podstawienie:



 Osobny artykuł: Wzór Eulera.
Osobny artykuł: Wzór Eulera.





Wzory te pozwalają łatwo przekształcać wyrażenia trygonometryczne, poprzez przejście na postać zespoloną (cztery ostatnie wzory), uproszczenie i powrót na postać trygonometryczną (pierwszy wzór).
Inne zależności między funkcjami trygonometrycznymi[edytuj | edytuj kod]

Wzór de Moivre’a

lub ogólniej:
![{\displaystyle [r(\cos x+i\sin x)]^{n}=r^{n}(\cos nx+i\sin nx)\qquad n\in \mathbb {N} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/76357c43423817aec6638c42c3dfecbcfbbcfde5)

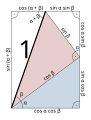 Sinus i cosinus sumy kątów
Sinus i cosinus sumy kątów Sinus i cosinus różnicy kątów
Sinus i cosinus różnicy kątów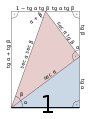 Tangens sumy kątów
Tangens sumy kątów Tangens różnicy kątów
Tangens różnicy kątów Cotangens sumy kątów
Cotangens sumy kątów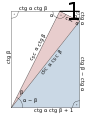 Cotangens różnicy kątów
Cotangens różnicy kątów




