
Curiosity Rover
|
|
Ten artykuł od 2020-08 wymaga modyfikacji na podstawie najświeższych informacji. |
.jpg)
| |
| Inne nazwy |
Curiosity |
|---|---|
| Zaangażowani | |
| Indeks COSPAR |
2011-070A |
| Rakieta nośna | |
| Miejsce startu | |
| Cel misji | |
| Cel misji | |
| Orbita (docelowa, początkowa) | |
| Czas trwania | |
| Początek misji |
26 listopada 2011 (15:02 UTC) |
| Data lądowania |
6 sierpnia 2012 (05:17:57 UTC) |
| Wymiary | |
| Wymiary |
4,5 m średnicy, 3 m wys. łazik Curiosity: 3,0 m dług., 2,8 m szer., 2,1 m wys. |
| Masa całkowita |
3893 kg łazik Curiosity: 899 kg |
| Masa aparatury naukowej |
75 kg |

Curiosity Rover – zautomatyzowane i autonomiczne laboratorium naukowo-badawcze wysłane na Marsa, w ramach programu badawczego Mars Science Laboratory (MSL) w celu oceny możliwości występowania potencjalnych warunków do życia w przeszłości, zbadania możliwości utrzymania się życia organicznego na Marsie, wykonania pomiarów meteorologicznych, poszukiwania pierwiastków biogennych, badania stopnia wilgotności gleby oraz poszukiwania wody i związków mineralnych z nią związanych, przeprowadzenia pomiarów widma wysokoenergetycznego promieniowania naturalnego, zbadania składu skał i gleby oraz określenia charakterystyki możliwych cyklów hydrologicznych na badanej planecie.
Curiosity jest sześciokołowym pojazdem (łazikiem) z zamontowanym oprzyrządowaniem badawczym, ramieniem robotycznym, systemami nawigacyjnymi i komunikacyjnymi, awioniką, oprogramowaniem i autonomicznym źródłem zasilania – radioizotopowym generatorem termoelektrycznym.
Nazwę Curiosity wymyśliła w 2009 roku 12-letnia Clara Ma z miasta Lenexa w stanie Kansas. Jej propozycja okazała się najlepsza z ponad 9 tysięcy zgłoszeń z całych Stanów Zjednoczonych[1].
Polskim wkładem w Curiosity Rover są niechłodzone detektory na podczerwień MCT. Zostały wybrane i zastosowane w przestrajalnym spektrometrze laserowym zaprojektowanym do zbierania informacji o środowisku panującym na Marsie podczas misji Mars Science Laboratory. Detektory zostały opracowane przez firmę VIGO System S.A. z Ożarowa Mazowieckiego[2].
Jak poinformowała NASA, 22 września 2012 roku Curiosity Rover zbadał pierwszy kamień. Skałę wielkości piłki futbolowej badano od 46 do 48 dnia misji. Pierwszy okaz, który został wytypowany, aby przetestować systemy pomiarowe, nosi nazwę N 165. Został poddany działaniu lasera. Rozproszony materiał skalny, który wzbił się w atmosferę, posłużył do zbadania składu mineralnego. Po dokonaniu badań łazik wyruszył w dalszą drogę, pokonując 42 metry, co było najdłuższym dystansem od początku misji. Obszar, w którego stronę zwrócił się łazik, nosi nazwę Glenelg. Dla naukowców jest on interesujący, ponieważ łączą się tam trzy różne typy terenu charakterystyczne dla marsjańskiego krajobrazu[1].
Miejsce lądowania[edytuj | edytuj kod]
Miejscem lądowania misji, wybranym przez naukowców zaproszonych przez NASA, był krater Gale leżący na południe od równika. Zdjęcia satelitarne jego okolic ujawniły ślady wcześniejszego występowania ciekłej wody. Krater Gale jako miejsce lądowania można było wybrać dopiero podczas tej misji, bowiem jej konstrukcja umożliwiła określenie miejsca lądowania z czterokrotnie lepszą dokładnością. Dzięki temu uniknięto ryzyka lądowania w trudnym terenie w otoczeniu krateru[1]. Łazik wylądował w odległości ok. 6 km od góry Aeolis Mons i 2 km na północny wschód od celu, w miejscu, które przyjęło nazwę Bradbury Landing. Wybrany krater Gale ma 154 km średnicy i jest położony na wschodniej półkuli Marsa. W środku krateru znajduje się stromy szczyt, którego warstwowa struktura jest kopalnią informacji o historii Marsa. W pobliżu znajdują się ujścia dwóch kanałów zawierających osady naniesione w przeszłości przez wodę. Przez te kanały można będzie zbadać głębsze warstwy góry. Nazwa krateru pochodzi od nazwiska znanego amatora astronomii Waltera Gale’a (1865–1945). Pierwszy dzień misji, podczas którego nastąpiło lądowanie, nazwano Sol 0. Przez pierwsze dni specjaliści sprawdzali systemy zasilania i łączności. Curiosity zainstalował nową, lądową wersję oprogramowania, zmierzył nachylenie do poziomu (wylądował na niemal płaskim podłożu), trochę się odkurzył i wyciągnął wszystkie bezpiecznie schowane instrumenty[3].
Według naukowców krater Gale, jako krater uderzeniowy został uformowany 3,8 do 3,5 mld lat temu[4].

Zawieszenie rocker-bogie[edytuj | edytuj kod]





System jezdny łazika Curiosity jest powiększoną wersją trzech wcześniejszych łazików marsjańskich: Sojourner, Spirit i Opportunity. Istotną zmianą zastosowaną w łaziku Curiosity jest zastąpienie mechanizmu różnicowego drążkiem różnicowym. Natomiast, tak jak w poprzednich marsjańskich łazikach, każde z sześciu kół ma niezależny napęd. Koła przednie i tylne mają siłowniki sterowania, umożliwiające obrót łazika w miejscu, jak i jazdę po łuku. Zawieszenie łazika jest zawieszeniem typu rocker-bogie. Lewe i prawe koła łazika połączone przez drążek różnicowy, pozostają w kontakcie z podłożem, nawet wtedy, gdy jedno z kół pokonuje głaz wielkości koła. Po każdej stronie, wózek (bogie) łączy koła środkowe z kołami tylnymi. W części środkowej wózka znajduje się połączenie ruchowe w płaszczyźnie pionowej (przegub z jednym stopniem swobody), do którego podłączony jest jeden z końców elementu rocker[a], łączącego wózek z kołem przednim i w części środkowej rockera, poprzez oś stałą z kadłubem łazika.
Na podwoziu zawieszony jest kadłub łazika. Dwa punkty zawieszenia kadłuba, będące osiami stałymi stanowią połączenia ruchowe poprzez łożyska wpasowane w rockery. Wychylenie jednego rockera w płaszczyźnie pionowej pod pewnym kątem, zgodnie z ideą działania drążka różnicowego, powoduje wychylenie rockera po przeciwnej stronie, o taki sam kąt, ale przeciwnie skierowany. Właściwość ta powoduje, że rockery nie mogą wykonywać równoległych przemieszczeń względem kadłuba łazika[b], i co za tym idzie, łazik nie może obrócić się w płaszczyźnie pionowej tak, aby oprzeć się tyłem lub przodem na marsjańskim gruncie, mimo że pozornie jest zawieszony na dwóch osiach[5].
Przez pokład łazika Curiosity przechodzi drążek różnicowy umocowany w środkowej jego części, poprzez oś stałą, do kadłuba łazika. Dwa końce drążka różnicowego są połączone z dwoma rockerami poprzez dwa krótkie przeguby. W zawieszeniu rocker-bogie nie ma sprężyn. Brak sprężyn sprawia, że nacisk wszystkich kół na podłoże jest prawie taki sam, co jest istotne podczas przemieszczania się po piasku. Zmiana położenia wózka (bogie) lub koła przedniego spowodowana nierównościami terenu, dzięki zawieszeniu rocker-bogie i mechanizmowi różnicowemu, powoduje korzystne zmiany położeń pozostałych kół.
Jeżeli umieścimy model łazika Curiosity na podwyższeniu, tak aby koła wisiały w powietrzu i podniesiemy lewe przednie koło do góry o pewną wartość, to prawe przednie koło automatycznie obniży się o taką samą wartość. Jeżeli prawe przednie koło podniesiemy do góry o pewną wartość, to lewe przednie koło obniży się o tę samą wartość. Natomiast jeżeli spróbujemy podnieść dwa przednie koła, to wspomniane koła nie przemieszczą się względem kadłuba, a skierowana w tym celu energia spowoduje podniesienie do góry całego łazika[6].
Łazik ma aluminiowe koła o średnicy 50 cm. Zakrzywione szprychy tytanowe dają sprężyste wsparcie. Napędy siłowników, silników elektrycznych i skrzynia biegów – są nastawione na moment obrotowy, a nie prędkość. Łazik na płaskim twardym podłożu osiąga prędkość 4 cm na sekundę. Łazik został zaprojektowany i zbudowany tak, aby mógł przejechać więcej niż 20 km podczas zasadniczej misji. System zawieszenia łazika służył jako system lądowania, bezpośrednio pochłaniając siły uderzenia łazika o podłoże. System może być również wykorzystany do kopania pod powierzchnią, obracając jedno skrajne koło, zachowując pozostałe pięć kół nieruchome[5].
Na piaszczystym podłożu Marsa, protektory bieżników kół łazika, pozostawiają ślad literując „JPL” (Jet Propulsion Laboratory) w kodzie Morse’a (·--- ·--· ·-··)[7].
Kamery[edytuj | edytuj kod]
.jpg)
Na maszcie łazika zamontowanych jest siedem kamer:
- Teleskopowa kamera Makro[c] ang. microimager (element urządzenia ChemCam)
- Cztery czarno-białe kamery nawigacyjne (Navcam) (dwie z lewej, dwie z prawej strony masztu)
- Dwie kolorowe kamery masztowe z matrycami o wielkości 2 Megapikseli.
Na podwoziu łazika jest zamontowanych 8 kamer dostarczających czarno-biały obraz o niskiej rozdzielczości[d], szczególnie zabezpieczonych przed uderzeniami odłamkami skał ang. Hazard-Avoidance Cameras (HazCams), z matrycami o wielkości 1 Megapiksela. Z przodu łazika znajdują się dwie lewe kamery i dwie prawe, podobnie z tyłu. Kamery Hazcams mają szerokokątne obiektywy typu rybie oko, podczas lądowania obiektywy były zasłonięte przez przezroczyste pokrywki. 8 kamer Hazcams i 4 kamery nawigacyjne Navcams wchodzą w skład zestawu 12 kamer technicznych będących źródłem przestrzennego obrazu tworzącego stereoskopowe oczy marsjańskiego laboratorium. Połowa kamer technicznych to kamery zapasowe. Na podstawie obrazów otrzymanych z kamer Navcams i Hazcams naukowcy będą podejmować decyzje jakimi szlakami będzie poruszał się łazik i które skały będą poddawane badaniom[8].
Kamery masztowe[edytuj | edytuj kod]




Oczami łazika Curiosity są dwie dwu megapikselowe kolorowe kamery wideo umieszczone po lewej (z obiektywem 34 mm) i po prawej stronie masztu (z obiektywem 100 mm). Prawa kamera ang. Mastcam patrzy przez teleobiektyw, ujawniając szczegóły blisko lub daleko z około trzykrotnie wyższą rozdzielczością niż jakiekolwiek kamery przedtem. Lewa kamera Mastcam zapewnia szerszy kontekst przez obiektyw o szerszym kącie. Każda z nich może wykonywać i przechowywać tysiące obrazów kolorowych. Każda z tych kamer jest zdolna do rejestrowania filmów wideo w wysokiej rozdzielczości. Połączenie informacji z obu kamer może dać obrazy 3-D.
Prawa kamera jest nazywana „Mastcam 100” ze względu na 100-milimetrowej długości ogniskową obiektywu. Jej obrazy obejmują obszar około sześciu stopni szerokości i pięć stopni wysokości. Matryca zawiera pole 1600 pikseli na 1200 pikseli. Daje to skalę 7,4 cm na piksel w odległości ok. 1 km i ok. 150 μm na piksel w odległości 2 m. Kamera zapewnia wystarczającą rozdzielczość, aby przeczytać „jeden cent” na monecie leżącej na podłożu obok łazika.
Jej lewy partner, kamera nazywana „Mastcam 34” ze względu na 34-milimetrowy obiektyw, obejmuje scenę trzy razy większą – o 18 stopniach szerokości i 15 stopniach wysokości – ma identyczne matryce, może ona uzyskać obrazy o 22 cm na piksel w odległości ok. 1 km i 450 mikronów na piksel z odległości 2 m. Kiedy łazik Curiosity zmienia miejsce postoju, Mastcam 34 rejestruje panoramę zdjęć o pełnym okręgu, składającą się ze 150 obrazów wykonanych w czasie 25 minut.
Centra soczewek kamer masztowych są umocowane 2,0 metry nad podłożem. Obiektywy są dalej od siebie – 25 cm – niż stereo obiektywy na wcześniejszych robotach marsjańskich. Kamery można skupić na dowolnym obiekcie znajdującym się w odległości od ok. 2 m do nieskończoności. Zespół będzie mógł widzieć dalej, niż było to możliwe dotychczas. Filmy wideo będą służyć do studiowania mechaniki oddziaływań kół łazika z marsjańskim podłożem, i jako filmy wspomagające analizę użycia wysięgnika marsjańskiego robota.
Kamery umieszczone na maszcie i dwie inne kamery Curiosity Mars Hand Imager Lens i Mars Imager Descent zostały wykonane przez Malin Space Science Systems z San Diego w stanie Kalifornia. Cztery kamery z Malin Space Science Systems zastosowane na łaziku Curiosity łączy kilka wspólnych cech. Używają one filtru Bayer, jaki można znaleźć w wielu komercyjnych aparatach cyfrowych, do obrazowania kolorów. Wzór Bayer jest mozaiką kolorów, służącą do zorganizowania filtrów kolorów RGB na kwadratowej siatce czujników fotograficznych (matrycy CCD)[9]. Matryca, w którą wbudowany jest filtr Bayer, jest pokryta filtrami tak, aby każdy piksel był przysłonięty kolorowymi filtrami w następującym stosunku: 50% zielony, 25% czerwony, 25% niebieski[10]. Każdy piksel filtru Bayer jest przysłonięty submozaiką, na którą składa się siatka (2 × 2) zbudowana z jednego filtru czerwonego, 1 niebieskiego i dwóch filtrów zielonych. Każdy piksel rejestruje poziom natężenia światła w jednym z kolorów podstawowych i w zasadzie w matrycy CCD jest on subpikselem[11]. Filtr stosowany do projektowania kamer łazika Curiosity osiąga na zdjęciach rezultaty, w których kolor ściśle naśladuje sposób, w jaki ludzkie oko widzi świat[10].
Oprócz wbudowanej na stałe w kamerę czerwono-zielono-niebieskiej siatki filtracyjnej, kamery masztowe mogą zastosować inne wymienne filtry, umieszczone pomiędzy obiektywem a matrycą CCD. Zalicza się do nich spektralne filtry służące do badania podłoża lub nieba w wąskim zakresie światła widzialnego lub o długości fali bliskiej podczerwieni. Jeden dodatkowy filtr na każdej masztowej kamerze, pozwala patrzeć bezpośrednio na Słońce, w celu zmierzenia ilości pyłu w atmosferze, będącego kluczową częścią marsjańskiej pogody.
W skład kalibracji koloru docelowego, kamer masztowych na pokładzie łazika, wchodzi oddziaływanie magnesów chroniących układy scalone chrominancji i automatycznej regulacji bieli przed niekorzystnym wpływem gromadzenia się marsjańskiego kurzu w sąsiedztwie wspomnianych elementów. Naturalne oświetlenie na Marsie bywa czerwieńsze niż na Ziemi, w wyniku oddziaływania pyłu marsjańskiej atmosfery. Obrazy zabarwione „prawdziwym kolorem” marsjańskim zawierają efekt świetlny porównywalny do ciepłego, pomarańczowego oświetlenia, które towarzyszy zachodowi Słońca na Ziemi. Kalkulacje balansu bieli, realizowane w celu dostosowania odcienia oświetlenia, jak to zwykle czyni ludzkie oko, mogą robić kamery cyfrowe. Kamery cyfrowe są zdolne do wytwarzania zarówno True color, jak i obrazów z poprawnie zbalansowaną bielą[9].
Filmowa kamera (MARDI)[edytuj | edytuj kod]


Podczas opadania i lądowania kolorowych obrazów dostarczało urządzenie o nazwie Filmowa Kamera Cyklu Opadania, ang. Mars Descent Imager (MARDI), służące m.in. także do określenia położenia łazika. Kamera MARDI zapisała w swojej 8 GB pamięci flash film z częstotliwością 4 klatek/sekundę, z zawartością od 1200 do 1600 pikseli na klatkę, z czasem ekspozycji 4 milisekundy. Podczas ostatnich dwóch minut opadania łazika Curiosity na powierzchnię Marsa, kamera MARDI, skierowana w dół, nagrywała kolorowy film zbliżającej się powierzchni. Zapewniło to zespołowi Mars Science Laboratory informacje o miejscu lądowania. Po wylądowaniu na powierzchni Marsa MARDI zademonstrowała swoje zdolności do uzyskiwania obrazów gruntu pod łazikiem, kiedy rozdzielczość osiągnęła 1,5 mm na piksel. MARDI składa się z dwóch części: kamera z szerokokątnym obiektywem, zamontowana na lewej burcie, skierowana w dół i cyfrowa kamera zamontowana wewnątrz podwozia. Obydwie kamery są podobnymi modelami jak kamera zamontowana na obrotowej/rewolwerowej wieżyczce wysięgnika, czyli kamera MAHLI[12].
Ręczna kamera MAHLI[edytuj | edytuj kod]
.jpg)



Kolejną kamerą dostarczającą kolorowych zdjęć jest Marsjańska Ręczna Kamera ang. Mars Hand Lens Imager (MAHLI), umieszczona jako jedno z pięciu urządzeń wchodzących w skład rewolwerowej wieżyczki znajdującej się na końcu wysięgnika marsjańskiego robota. Jest to ręczna kamera wyposażona w obiektyw makro i autofokus, przeznaczona do robienia zbliżeń skał i gruntu marsjańskiego, ale nie jest wykluczone robienie również zdjęć do horyzontu.
Po umieszczeniu aparatu na najmniejszej dopuszczalnej odległości od obiektu – ok. 21 mm – obraz powstały na matrycy aparatu ma rozdzielczość nieco mniejszą niż 14 μm na 1 piksel. Polem widoku tak powstałego zbliżenia jest prostokąt o bokach 2,2 na 1,7 cm. MAHLI ma dwa zestawy diod LED, które umożliwiają wykonywanie zdjęć w nocy lub przy słabym oświetleniu. Dwie inne diody emitują falę elektromagnetyczną o długości 365 nanometra w ultrafiolecie. W tym przypadku istnieje możliwość fluorescencji materiałów marsjańskich pobudzonych tą iluminacją[13].
Chemcam[edytuj | edytuj kod]



.jpg)
Na szczycie masztu łazika Curiosity znajduje się urządzenie Chemcam, służące do określania składu chemicznego badanych skał. Do zainicjowania badania używa się wiązki światła lasera, skierowanej do wybranej skały w celu chwilowego podniesienia temperatury badanego materiału. Informacja o składzie badanego materiału, z której korzysta Chemcam jest zawarta w rozbłysku będącym skutkiem krótkich serii lasera. Ostateczne wnioski wynikające z tych analiz są wyciągane na Ziemi, a pomocne w tych badaniach jest urządzenie nazywane Odporny na Promieniowanie Stos Inteligentnej Pamięci, ang. Radiation Tolerant Intelligent Memory Stack (RTIMS). Urządzenie RTIMS jest umieszczone wewnątrz instrumentu Chemcam na maszcie, ang. Remote Sensing Mast (RSM)[14].
Kierunek ustawienia masztu jest zdalnie sterowany z Ziemi. Umieszczony na jego szczycie instrument Chemcam składa się z lasera, obiektywu do zdjęć makro i z teleskopu, który umożliwia wykonywanie zdjęć makro z dogodnej odległości[e]. Wszystkie te urządzenia kieruje się w stronę badanego obiektu znajdującego się w sąsiedztwie łazika (do 7 metrów). Seriami wiązki światła lasera odparowuje się niewielką ilość (łepek od szpilki) badanego materiału. Powstały w wyniku działań lasera rozbłysk, będący zjonizowanym gazem jest odbierany przez teleskop i następnie poprzez światłowód przekazywany jest do analizatora w celu określenia składu chemicznego badanego materiału. Analizator będący częścią urządzenia Chemcam nie znajduje się na maszcie, lecz we wnętrzu łazika i składa się z trzech spektrometrów[15].
Wytwarzanie laserem jonizacji na potrzeby spektrometru, ang. Laser-Induced Breakdown Spectrometer (LIBS), to zadanie instrumentów znajdujących się na maszcie i wewnątrz kadłuba łazika[16].
Czas trwania serii i ilość impulsów w serii emitowanej przez laser wiązki można zmieniać. Podczas pierwszej emisji, w kierunku kamienia wielkości pięści, laser urządzenia Chemcam wysłał serię 30 impulsów w czasie 10 sekund. Moc jednego impulsu przewyższała wartość miliona Watów, czas trwania impulsu lasera wynosił 5·10−9 (pięć miliardowych) sekundy. Szerokość zakresu fal elektromagnetycznych, które są odbierane przez 3 spektroskopy optyczne zawiera się w przedziale widma, od nadfioletu, poprzez światło widzialne do podczerwieni włącznie[17].
Kamera do zdjęć makro, ang. Remote Micro-Imager (RMI), jest wykorzystana jako aparat kontekstowy dla LIBS, choć w przeciwieństwie do LIBS, nie ma żadnych ograniczeń odległościowych dla obiektów które mają być sfotografowane[18].
Chemia i mineralogia (CheMin)[edytuj | edytuj kod]




Chemiczne i mineralogiczne analizy (ang. Chemistry and Mineralogy) prowadzone w ramach osobnego działu (Chemin), analizują zmielone skały i grunt marsjański, dostarczane w formie próbek, przez ramię robota. Próbki te wytwarza wiertarka udarowa, która jest jednym z pięciu urządzeń umieszczonych na rewolwerowej wieżyczce wysięgnika robota łazika Curiosity. Natomiast grunt marsjański w skład którego wchodzi mieszanka piasku i kurzu jest pobierany czerpakiem łopatki wchodzącym w skład urządzenia CHIMRA też będącego jednym z urządzeń wieżyczki rewolwerowej. Niezależnie od tego czy próbka została pobrana wiertarką udarową, czy łopatką, przechodzi przez urządzenie CHIMRA i z wyjścia CHIMRA podawana jest do wejścia urządzenia Chemin znajdującego się we wnętrzu kadłuba łazika Curiosity.
Minerały dostarczają trwałego zapisu o warunkach środowiskowych panujących w przeszłości na Marsie, a szczególnie, informacje o składnikach i źródłach energii mogących sprzyjać istnieniu życia. Chemin po raz pierwszy w marsjańskich misjach używa dyfrakcji rentgenowskiej. Dyfrakcja rentgenowska polega na kierowaniu wiązki promieni X na badaną próbkę i określeniu jak promienie X są rozpraszane przez próbkę na poziomie atomowym. Wszystkie minerały są kryształami, czyli są zbudowane z materiałów krystalicznych, w których atomy są zorganizowane w powtarzającą się strukturę, która powoduje, że promienie X rozpraszane są pod przewidywalnymi kątami. Z tych kątów naukowcy są w stanie wydedukować odległości między płaszczyznami w atomach, z których zbudowane są kryształy. Każdy minerał ze względu na swoją budowę zajmuje określone miejsce wśród układów krystalograficznych i może być rozpoznany na drodze dyfrakcji rentgenowskiej. Ta metoda badania marsjańskich próbek pozwala na bardziej szczegółowe określanie ich składu niż dotychczas.
Próbki skał dla urządzenia Chemin pozyskiwane są jako urobek wiertarki udarowej, lub czerpane łopatką urządzenia CHIMRA. Sproszkowane skały i podłoże są przesiewane tak, aby do lejka wlotowego nie dostały się cząstki większe niż 150 μm. Na górnej powierzchni kadłuba, w pobliżu przodu, poprzez lejek prowadzi droga do urządzenia Chemin we wnętrzu łazika. Chemin jest sześcianem o boku 25 cm i wadze 10 kg umieszczonym we wnętrzu kadłuba łazika. Urządzeniem Chemin można wykryć takie minerały jak: fosforany, węglany, siarczany, krzemionki. Chemin pomaga zachować biologiczne „podpisy” zachowane w minerałach[19].
Gdy łazik dostarcza próbki do urządzenia Chemin, przesypywane są one do jednego z zespołów komórek (w urządzeniu Chemin jest 16 par podwójnych zespołów komórkowych.) Pary komórek działają jak kamertony, wibrując ok. 2000 razy na sekundę wzbudzane przez piezoelektryczne urządzenie umieszczone między dwoma ramionami kamertonu. Gdy pary komórek wibrują, wypełniające je cząstki zachowują się jak ciecz. Drgania te pozwalają generatorowi promieniowania rentgenowskiego trafić swoimi promieniami z losowych kierunków wszystkie ziarna. Ta innowacyjna technologia została wprowadzona do użytku komercyjnego w zminiaturyzowanych rentgenowskich instrumentach dyfrakcyjnych. System wibracji proszku umożliwia analizowanie źle przygotowanych lub właśnie otrzymanych próbek do analizy, bez wstępnego przygotowania. Jest to użyteczne w przypadku, gdy przygotowanie próbki jest niemożliwe (np. na Marsie) lub gdy delikatne materiały (takie jak produkty farmaceutyczne) zostały zniszczone lub zmienione przez intensywne szlifowanie. Wdrożenie systemu wibracji proszku było kluczowym krokiem umożliwiającym funkcjonowanie małym rentgenowskim instrumentom[20].
Analizy próbek na Marsie (SAM)[edytuj | edytuj kod]



Do analizy próbek na Marsie, ang. Sample Analysis at Mars (SAM), używa się zestawu trojga narzędzi analitycznych zamontowanych wewnątrz łazika Curiosity w celu studiowania ewentualnych chemicznych procesów organicznych. Jednym z najważniejszych kluczy w labiryncie szukania śladów życia jest sprawdzenie istnienia związków węglowych, które na Ziemi tworzą molekularne cegiełki życia. SAM analizuje gazy marsjańskiej atmosfery, oraz gazy uwięzione w skałach. Analityczne instrumenty urządzenia SAM zostały umieszczone w skrzynce wielkości kuchenki mikrofalowej w przedniej części łazika.
Jednym z instrumentów urządzenia SAM jest spektrometr masowy, który identyfikuje gazy według masy cząsteczkowej i ładunku elektrycznego ich zjonizowanych stanów. Spektrometr masowy będzie szukał ważnych do życia pierwiastków, takich jak azot, fosfor, siarka, tlen, wodór, a także związku chemicznego dwutlenku węgla.
Kolejnym narzędziem jest strojony spektrometr laserowy, wykorzystujący absorpcję światła o określonych długościach fali do pomiaru stężenia metanu, dwutlenku węgla i pary wodnej. Urządzenie to określa proporcje różnych izotopów wspomnianych gazów. Izotopy tego samego gazu o różnych masach atomowych i ich wzajemne proporcje mogą stanowić podpisy planetarnych procesów zachodzących w dawnej marsjańskiej atmosferze, którą to planeta ewentualnie utraciła.
Trzecim analitycznym instrumentem urządzenia SAM jest chromatograf gazowy służący do separacji poszczególnych gazów z ich mieszaniny. Wydzielone frakcje z chromatografu gazowego są podawane do spektrometru gazowego w celu bardziej dokładnej identyfikacji. Jeżeli SAM nie wykryje żadnych organizmów, będzie to informacja że życia na Marsie nie należy szukać blisko powierzchni – następne misje będą szukać głębiej[22].
Stacja Monitorowania Środowiska (REMS)[edytuj | edytuj kod]





Stacja Monitorująca Środowisko, ang. Rover Environmental Monitoring Station (REMS), rejestruje informacje o zmianach codziennych i sezonowych w pogodzie Marsa. REMS, co godzinę, każdego marsjańskiego dnia zapisuje 5 minut danych dla wszystkich czujników. Badanie to mierzy: prędkość wiatru, kierunek wiatru, ciśnienie powietrza, wilgotność względną, temperaturę powietrza, temperaturę gruntu, intensywność promieniowania ultrafioletowego.
Informacje na temat wiatru, temperatury i wilgotności pochodzą z elektronicznych czujników na dwóch wysięgnikach długich jak palec, poziomo wystających, lekko rozszerzających się z głównego masztu trzymającego urządzenie ChemCam. Każdy z wysięgników ma czujnik do rejestrowania temperatury powietrza i trzy czujniki do wykrywania ruchu powietrza w trzech wymiarach. Rozmieszczenie wysięgników przesuniętych o kąty 120° względem siebie, umożliwia obliczania nawet wtedy, gdy główny maszt blokuje wiatr z jednego kierunku[23].
Osobno do wysięgników zamontowane są czujnik temperatury podłoża i czujnik wilgotności względnej. Temperatura podłoża jest mierzona czujnikiem podczerwieni. Intensywność promieniowania ultrafioletowego mierzy czujnik umieszczony w górnej części pokładu, składający się z sześciu fotodiód pracujących w następujących podzakresach: 315–370 nm (UVA), 280–320 nm (UVB), 220–280 nm (UVC), 200–370 nm (dawka całkowita), 230–290 nm (UVD), and 300–350 nm (UVE). Czujnik ma dokładność większą niż 8% w całym zakresie wszystkich kanałów, skalibrowaną przy założeniu poziomu radiacji występującej na Marsie i przy minimalnym zapyleniu marsjańskiej atmosfery. Czujnik jest umieszczony na pokładzie łazika bez ochrony przed pyłem. Aby zmniejszyć wpływ zapylenia na czujnik, wokół każdej fotodiody został umieszczony pierścień magnetyczny w celu maksymalizacji czasu działania. Niemniej jednak, w celu oceny stopnia zapylenia diód, czujnik będzie okresowo fotografowany. Porównanie tych obrazów z pomiarami laboratoryjnymi pozwoli oszacować poziom absorpcji pyłu.
Fotodiody patrzą w kierunku zenitu a ich pole widoku obejmuje 60°. Czujnik ciśnienia z zakresem pomiarowym od 1 do 1150 Pa umieszczony jest wewnątrz kadłuba łazika i połączony jest tubą z marsjańską atmosferą poprzez filtr HEPA[24].
Badania REMS zwiększą zrozumienie globalnej atmosfery Marsa, a także przyczynią się do oceny możliwości zamieszkiwania Marsa przez misje załogowe. Zespół planuje składać codzienne raporty z Curiosity. Oczekuje się, że temperatura powietrza wokół masztu łazika prawdopodobnie spadnie do ok. –90 °C, w niektóre zimowe noce i wzrośnie do ok. –30 °C podczas dni zimowych. W cieplejszych porach roku, po południu temperatura powietrza może osiągnąć 0 °C.
Na marsie występuje fenomen pogodowy odpowiedzialny za duże, cykliczne wahania ciśnienia dobowego na powierzchni Marsa. Światło słonecze nagrzewa powierzchnię i atmosferę po dziennej stronie planety, powodując wzrost objętości powietrza. Na wyższych poziomach atmosfery, powstają wypukłości powietrza, rozszerzające się na zewnątrz, w celu wyrównania ciśnienia, tak jak na rysunku wskazują czerwone strzałki. Podgrzane powietrze wypływa z wybrzuszenia, obniżając ciśnienie odczuwane na powierzchni poniżej wybrzuszenia. W efekcie powstaje głęboka atmosfera, która jest lżejsza i ma niższe ciśnienie na powierzchni Marsa, niż ta po nocnej stronie planety. Ponieważ Mars obraca się względem słońca, to wybrzuszenie atmosfery podąża za Słońcem każdego dnia, od wschodu do zachodu. Stały obserwator, taki jak łazik NASA Curiosity, obserwuje spadek ciśnienia w ciągu dnia, a następnie wzrost ciśnienia w nocy. Dokładny czas wzrostu i spadku ciśnienia dotyczy czasu potrzebnego do reakcji atmosfery na światło słoneczne, jak również szereg innych czynników, takich jak kształt powierzchni planety, brak cyklu wodnego i ilość pyłu w powietrzu[25].
Stacja Monitorowania Środowiska zmierzyła marsjańskie ciśnienie atmosferyczne w dniach Sol 31[f] (6 września 2012) i Sol 93 (7 listopada 2012). Ciśnienie to jest miarą ilości powietrza w całej kolumnie atmosfery powyżej łazika Curiosity. W przedziale między Sol 31 i Sol 93 wystąpiły duże zmiany ciśnienia w cyklach dziennych, które były efektem rosnącej masy marsjańskiej atmosfery na półkuli południowej w związku ze zbliżaniem się wiosny. Dzieje się tak dlatego, że półkula południowa otrzymuje w tym czasie dużo więcej światła słonecznego, skutkiem czego dwutlenek węgla paruje/sublimuje z zimowej polarnej czapy bieguna południowego. W efekcie każdego roku atmosfera rośnie i kurczy się o ok. 30% w związku z parowaniem i krzepnięciem/resublimacją dwutlenku węgla. Pomiary wahań ciśnienia pokazują również silne codzienne wahania ciśnienia o ok. 10%, ze szczytem w pobliżu marsjańskiej siódmej rano i minimum w pobliżu godziny szesnastej. Ten codzienny cykl wahań ciśnienia jest spowodowany pływem[g] „fali cieplnej” – fali globalnego ciśnienia atmosfery marsjańskiej przesuwanej poprzez ogrzewanie promieniami słonecznymi atmosfery i powierzchni planety[26].
Czujnik pomiaru promieniowania (RAD)[edytuj | edytuj kod]




Czujnik pomiaru promieniowania jonizującego, ang. Radiation Assessment Detector (RAD), jest przeznaczony do monitorowania wysoko energetycznych cząstek atomowych i subatomowych, osiągających powierzchnię Marsa, będących skutkiem wiatru słonecznego, odległych gwiazd supernowych i innych źródeł. Cząstki te, stanowiące tło naturalnego promieniowania, mogą być szkodliwe dla drobnoustrojów w pobliżu powierzchni Marsa, lub dla astronautów przyszłych misji załogowych.
Ważący 1,7 kg instrument RAD ma szerokokątny teleskop skierowany ku górze, z lewej przedniej części łazika. Teleskop ma czujniki cząstek naładowanych, których masa nie przekracza masy jonu żelaza. RAD może również wykryć neutrony i promieniowanie gamma pochodzące z marsjańskiej atmosfery lub gleby w najbliższym otoczeniu łazika[27].
Pole magnetyczne i atmosfera ziemska zapewniają na naszej planecie skuteczną tarczę ochronną przed potencjalnymi, śmiertelnymi skutkami galaktycznego, kosmicznego i słonecznego promieniowania jonizującego. Na Marsie nie ma globalnego pola magnetycznego, a marsjańska atmosfera (w porównaniu z atmosferą ziemską) zapewnia tylko 1% skuteczności ochrony przed promieniowaniem jonizującym. W celu sprawdzania i kalibracji RAD, zespół specjalistów pracujących nad instrumentem RAD umieszczał go wewnątrz akceleratorów w ośrodkach badawczych w Stanach Zjednoczonych, Europie, Japonii i Republiki Południowej Afryki.
Na powierzchni Marsa, nigdy wcześniej (do sierpnia 2012 r.) nie było takiego instrumentu, a dotychczasowe szacunki promieniowania jonizującego powierzchni planety polegały na prognozowaniu, jak cienka atmosfera wpływa na energetyczne cząstki, ale niepewność w modelowaniu pozostawała duża[28].
Obecne pomiary wskazują na występowanie codziennych cykli promieniowania jonizującego i ciśnienia atmosferycznego. Wraz ze wzrostem ciśnienia, dawka promieniowania zmniejsza się. Kiedy warstwa atmosfery poszerza się (podczas marsjańskiego dnia), zapewnia lepszą barierę i bardziej skuteczne ekranowanie na promieniowanie z zewnątrz Marsa. W każdym z maksimów ciśnienia, poziom promieniowania spada od 3 do 5%. Na końcu krzywej wzrasta poziom promieniowania, z czego wynika, że oprócz dobowych są także inne cykle.
Czerwona linia oznacza całkowitą dawkę promieniowania cząstek jonizujących i neutronów, wykrytych przez detektor RAD łazika Curiosity. Niebieskie kropki reprezentują ciśnienie atmosferyczne w jednostkach Pa (podzielonych przez cztery) zmierzone przez czujnik ciśnienia atmosferycznego stacji REMS. Atmosferyczne parametry zostały tak przeskalowane, aby umieścić je w tej samej podziałce, co dane promieniowania jonizującego.
Dawki promieniowania jonizującego i ciśnienia atmosferycznego były wyznaczane w ciągu pięciu marsjańskich dni, co w warunkach ziemskich odpowiada okresowi od 26 sierpnia do 1 września 2012. Curiosity wylądował na Marsie 5 sierpnia 2012 roku. Dawki promieniowania jonizującego zostały podane w jednostkach niemianowanych. Kalibracja przyrządu RAD ciągle trwa[29]
Długoterminowe wahania promieniowania jonizującego w kraterze Gale, zostały zmierzone przez czujnik pomiaru promieniowania jonizującego w ciągu ok. 50 dni marsjańskich (na Ziemi Sol 10 oznacza 15 września i Sol 60 oznacza 6 października 2012). Dawki cząstek naładowanych mierzono detektorem krzemowym i są podane w kolorze czarnym. Całkowite dawki (zarówno cząstek naładowanych i cząstek neutralnych) mierzono za pomocą scyntylatora, w którym materiałem pochłaniającym jest tworzywo sztuczne, podane są w kolorze czerwonym.
Intensywności promieniowania jonizującego na powierzchni Marsa można podzielić na cykle jednodniowe i długoterminowe. Cykle jednodniowe biorą źródło z cyklicznych codziennych zmian grubości atmosfery Marsa. Dłuższe zmiany są skutkiem zmian w strukturach gazu i plazmy w przestrzeni międzyplanetarnej koło Marsa. Struktura ta, nazywana heliosferą, jest związana magnetycznie ze Słońcem i obraca się wraz ze Słońcem w okresie ok. 27 dni, zapewniając tarczę ochronną przed galaktycznym promieniowaniem kosmicznym spoza układu słonecznego, w taki sam sposób, w jaki atmosfera Marsa zapewnia ekranowanie chroniące przed wiatrem słonecznym[30].
Dynamiczne Albedo Neutronów (DAN)[edytuj | edytuj kod]


Urządzenie Dynamiczne Albedo Neutronów, ang. Dynamic Albedo of Neutrons (DAN), może wykryć wodę związaną w płytkich podziemnych minerałach wzdłuż ścieżki poruszania się łazika. Instrument DAN wysyła wiązkę neutronów w podłoże i mierzy ich rozproszenie, nadając tej operacji możliwość znajdywania wodoru do głębokości ok. 50 cm bezpośrednio pod łazikiem. DAN przeniesie na powierzchnię Marsa osiągnięcia technologii jądrowej, która już wykryła wodę z orbity Marsa. „Albedo” w języku naukowców badających Marsa odnosi się do wartości energii odbitych neutronów – w tym przypadku, jak wysokiej energii neutrony wtórne są odbijane przez jądra znajdujące się w podłożu, po wstrzyknięciu określonej dawki przez instrument DAN. Wyemitowane przez generator neutrony, zderzają się z atomami wodoru, odbijają się z charakterystycznym spadkiem poziomu energii, tak jak jedna kula bilardowa traci energię, uderzając drugą. Poprzez pomiar energii odbitych neutronów, DAN może wykryć frakcję, która była przyczyną zmniejszenia energii wyemitowanych neutronów, a co za tym idzie, ilość wodoru w podłożu.
Czas trwania impulsu neutronów wyemitowanego przez generator wynosi 1 μs, częstotliwość powtarzania wynosi 10 impulsów na sekundę, a w każdym impulsie jest ok. 10 mln neutronów. Podczas trwania misji generator będzie w stanie wygenerować 10 mln impulsów[31].
Robot łazika[edytuj | edytuj kod]


Ramię robota ma pięć stopni swobody ruchu zapewnionych przez siłowniki obrotowe znanych jako:
- Ramię z przegubem azymutalnym
- Ramię z przegubem uniesienie barku
- Przegub łokciowy
- Przegub nadgarstkowy
- Przegub wieżyczki
Wysięgnik robota łazika połączony jest z rewolwerową (obrotową) wieżyczką, ang. turret, za pomocą przegubu wieżyczki. Rewolwerowa wieżyczka ma 5 stopni swobody ruchu, waży 33 kg i ma średnicę 60 cm. Zawiera 5 urządzeń i są to:
- Wiertarka udarowa do zbierania sproszkowanych próbek z wnętrza skał, wchodząca w skład systemu ang. Powder Acquisition Drill System (PADS). Jeśli wiertło zostaje zablokowane w skale, wiertarka może zastąpić go zapasowym. Zapasowe wiertła znajdują się w dwóch boksach umieszczonych w prawej przedniej części łazika.
- Urządzenie do usuwania kurzu, ang. Dust Removal Tool (DRT), szczotka wykonana z metalowego włosia służąca do usuwania kurzu z marsjańskich skał i tacek do obserwacji próbek.
- Rentgenowski spektometr cząstek alfa, ang. Alpha Particle X-ray Spectrometer (APXS), służy do identyfikacji chemicznych składników marsjańskiego gruntu.
- Wielofunkcyjne urządzenie nazywane Zbieranie, Magazynowanie i Analizowanie Skał Marsjańskich, ang. Collection and Handling for In-situ Martian Rock Analysis (CHIMRA), zawierające czerpak do zbierania gruntu, zestaw komór i labiryntów do przesiewania, porcjowania próbek skał, pyłu i gruntu w celu ich przygotowania do analiz.
- Niewielka kamera, ang. Mars Hand Lens Imager (MAHLI)[32].
Rentgenowski Spektrometr Cząstek Alfa (APXS)[edytuj | edytuj kod]

Rentgenowski Spektrometr Cząstek Alfa, ang. Alpha Particle X-Ray Spectrometer (APXS), jest jednym z instrumentów zainstalowanych na rewolwerowej wieżyczce zamontowanej na końcu wysięgnika robota i służy do identyfikacji chemicznych składników marsjańskich skał i podłoża. Ideą działania APXS jest odpowiedź marsjańskiego obiektu pobudzonego przez niewielkie promieniowanie radioaktywne, odebrana przez detektor rentgenowski. Przyrząd wykrywa pierwiastki od sodu do strontu, włączając w to główne elementy formujące skały i podłoże marsjańskie takie jak: magnez, glin, krzem, wapń, żelazo i siarka. Podczas trwającego trzy godziny odczytu może wykrywać ważne elementy śladowe o stężeniu poniżej 100 części na milion. Ma wysoką czułość na elementy tworzące sole, takie jak siarka, chlor i brom, które mogą wskazywać na interakcję w przeszłości z wodą.
Zadaniem APXS jest kwalifikowanie próbek do analizy przez instrumenty laboratoriów Chemin i SAM. Spektrometr wykorzystuje radioaktywny pierwiastek kiur jako źródło bombardujące próbki energetyczną cząstką alfa (jądra helu) oraz promieniami rentgenowskimi. W odpowiedzi próbki emitują własne charakterystyczne promieniowanie rentgenowskie, które rejestruje detektor rentgenowski umieszczony w głowicy czujnika APXS. Elektroniczny pakiet, który znajduje się wewnątrz łazika, zapisuje wszystkie odebrane dawki promieniowania rentgenowskiego i porównuje z widmem promieniowania rentgenowskiego wysłanego do tej próbki. Gdy spektrometr styka się z badanym obiektem, analizuje ścieżkę o średnicy 1,7 cm, wykrywa elementy do głębokości ok. 5 mikronów, dla elementów o małej masie atomowej i do 10 razy głębiej, dla cięższych pierwiastków. Podczas operowania APXS może wystąpić konieczność użycia urządzenia do usuwania kurzu znajdującego się wraz APXS, w zestawie pięciu urządzeń rewolwerowej wieżyczki na końcu wysięgnika robota[33].
CHIMRA[edytuj | edytuj kod]




wana skała




ang. The Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA) jest jednym z pięciu urządzeń wchodzących w skład rewolwerowej wieżyczki umieszczonej na końcu ramienia robota łazika Curiosity. To urządzenie przetwarza próbki pozyskane za pośrednictwem czerpaka wbudowanej łopatki (oznaczona kolorem czerwonym) i wiertarki udarowej, która nie jest pokazana na rysunku i nie wchodzi w skład urządzenia CHIMRA, ale jest jednym z pięciu urządzeń wieżyczki rewolwerowej. CHIMRA jest urządzeniem, które dostarcza próbki do analitycznych instrumentów laboratorium wewnątrz łazika, którymi są Chemin i SAM.
Na rysunku urządzenia CHIMRA pokazane są dwie drogi dostarczania materiału do CHIMRA (czerpak łopatki dostarcza materiał do miejsca wskazanego na dole, a wiertarka udarowa dostarcza materiał do przewodu przesyłowego na górze). Rysunek przedstawia także umiejscowienie mechanizmu stosowanego do inicjowania drgań wieżyczki rewolwerowej i wspomagania przemieszczania próbek po wnętrzu instalacji CHIMRA. Kolorem żółtym oznaczony jest pojemnik porcjowania, w którym przetworzony materiał jest dzielony i dostarczany do analitycznych przyrządów laboratoryjnych[34].
Zdjęcie pokazujące wnętrze komór przetwarzania z materiałem próbki poniżej 150 mikrometrowego sita, przedstawia próbkę przetworzoną. Zostanie ona przekazana do boksu porcjowania, który odmierzy wielkość równą połowie dawki aspiryny dla dziecka. Ilość ta jest podyktowana ochroną przed zapchaniem się instrumentów, które mają otrzymać próbki. Porcje te trafią do gardzieli wejściowych urządzeń Chemin i SAM. Procedura przygotowania próbki obejmuje:
- Pobranie porcji marsjańskiego podłoża czerpakiem łopatki, lub pobranie próbki marsjańskiej skały wiertarką udarową
- Wprowadzenie badanego materiału w wibracje wewnątrz komór przetwarzania
- Przepuszczenie przez sito
- Podzielenie na odpowiednie porcje
- Przekazanie próbki do wlotów wejściowych CHEMIN lub SAM
Procedura przygotowania próbek jest powtarzana trzykrotnie i jest powszechnie stosowaną metodą podczas geochemicznych analiz laboratoryjnych na Ziemi[35].
Zdjęcie opisane „Za duże na sitko CHIMRA” przedstawia czerpak z cząstkami marsjańskiego podłoża, które były zbyt duże, aby przejść przez sito przetwarzania, które przepuszcza tylko cząstki mniejsze niż (150 mikronów)[36].
Czerpak łopatki może również zbierać próbki z wykopów dokonanych przez koła łazika (pięć kół unieruchomionych a jedno się obraca). W ten sposób czerpak może dostać się do materiału na głębokości ok. 20 cm poniżej powierzchni. Objętości próbek zagarniętego marsjańskiego podłoża może wynosić pomiędzy 1000 a 30 000 mm³[37].
PADS[edytuj | edytuj kod]








Urządzenie, w którym główną rolę spełnia wiertarka udarowa, ang. Powder Acquisition Drill System (PADS), jest odpowiedzialne za uzyskiwanie sproszkowanych próbek skały z głębokości do 5 cm poniżej jej powierzchni. Ramię wysięgnika robota może przyłożyć i przytrzymać wiertarkę uzbrojoną w wiertło do skały z siłą 240 do 300 N, PADS może następnie zdobyć próbkę skały bez konieczności dalszego ruchu ramienia robotycznego. PADS ma następujące możliwości:
- przemieszczania wiertła w głąb powierzchni skały,
- obracania wiertła (0 do 150 obrotów na minutę) w celu skrawania materiału skalnego,
- dostarczania udaru z częstotliwością 1800 uderzeń na minutę, o energii uderzenia od 0,4 do 0,8 J w celu wiercenia skały i kruszenia pobieranej próbki
- wymiany wiertła w wiertarce[37].
Wiertarka zarówno penetruje skałę, jak i kruszy próbki do odpowiedniego rozmiaru cząstek dla analitycznych przyrządów. Proszek skalny przemieszcza się w tulei otaczającej obracający się ślimak wiertła do wejścia urządzenia CHIMRA. Przemieszczanie się proszku przez urządzenie CHIMRA odbywa się grawitacyjnie, poprzez zmianę położenia i orientacji wieżyczki rewolwerowej i poprzez jej wibrację. Średnica otworu w skale po wierceniu wynosi 1,6 cm, a głębokość otworu do 5 cm, w zależności od topografii powierzchni skały. Sproszkowany materiał skalny z wierzchnich warstw (1,5 do 2 cm głębokości) osadza się na górnej części skały wokół otworu wiercenia i nie jest wykorzystywany. Uzyskana próbka poniżej tej głębokości jest przenoszona do CHIMRA w celu przesiewania i porcjowania[37].
Jeśli wiertło jest używane do obróbki szczególnie twardego materiału, takiego jak gruboziarniste skały bogate w kwarc, może ulec uszkodzeniu. Jeżeli tak się stanie, wiertarka ma możliwość wymiany wiertła na jedno z dwóch zapasowych umieszczonych w pojemniku po prawej stronie przodu łazika. Kiedy wiertarka odrzuci uszkodzone wiertło, ramię robota ustawi się naprzeciwko nowego wiertła i umieści go w uchwycie wiertarki. Podczas testowania prototypu wiertarki, stwierdzono, że może ona penetrować skały tak twarde, jak drobnoziarnisty bazalt bez znacznego zużycia wiertła[37].
DRT[edytuj | edytuj kod]

Zamontowane na wieżyczce rewolwerowej narzędzie do usuwania kurzu (ang. Dust Removal Tool, DRT), służy do usuwania kurzu i luźnych materiałów z powierzchni skalnych, czyszcząc je szczotką ze stalowego włosia. Konstrukcja DRT jest inna niż narzędzia stosowanego na łazikach Spirit i Opportunity (ang. Rock Abrasion Tool, RAT), ale oczekuje się, że ma podobnie skuteczne właściwości odkurzania. Napęd DRT wyłącznie obraca szczotkę – ramię robota umieszcza DRT w odpowiedniej pozycji i odległości od czyszczonej powierzchni. Obszar wyczyszczony przez DRT jest kołem i ma minimalną średnicę 45 mm. DRT może być także stosowany do usuwania materiału z tacki do obserwacji próbek[38].
Pierwsze użycie DRT łazika Curiosity nastąpiło w 150 marsjańskim dniu misji (Sol 150), czyli 6 stycznia 2013. Zdjęcie oczyszczonego skrawka skały wykonała kamera MAHLI z odległości ok. 25 cm, po oczyszczeniu skrawek skały przyjął nazwę „Ekwir_1”[39].
MMRTG[edytuj | edytuj kod]




Zasilanie łazika energią elektryczną jest realizowane przez radioizotopowy termoelektryczny generator, ang. Multi-Mission Radioisotope Thermoelectric Generator (MMRTG), dostarczony przez Departament Energii USA. MMRTG jest baterią ogniw jądrowych, która z wysoką sprawnością zamienia energię jądrową w energię elektryczną. Całość składa się z dwóch głównych elementów: ze źródła energii termicznej, którym jest dwutlenek plutonu-238 i półprzewodnikowego zestawu termopary. Paliwem wielozadaniowego radioizotopowego termoelektrycznego generatora jest 4,8 kg dwutlenku plutonu 238, jako źródło stałego dostarczania energii termicznej, którą termopara zamienia na energię elektryczną. Energia elektryczna służy do zasilania i ogrzewania łazika. MMRTG jest generatorem nowej generacji przeznaczonym do pracy na ciałach niebieskich mających atmosferę takich jak Mars, jak również w próżni. Generowana moc wynosi nieco ponad 110 W. Cele projektowe dla MMRTG to zapewnienie wysokiego stopnia bezpieczeństwa, optymalizacja poziomu mocy powyżej minimalnej żywotności 14 lat i obniżenie masy. W efekcie wymiary MMRTG wynoszą 64 cm średnicy i 66 cm długości przy wadze 45 kg.
Podobnie jak poprzednie generacje tego typu generatora, MMRTG zbudowany jest z kilku warstw materiału ochronnego, zaprojektowanych tak, aby ograniczyć negatywne skutki oddziaływania dwutlenku plutonu w wielu potencjalnie możliwych wypadkach, zweryfikowanych w testach zderzeniowych. W mało prawdopodobnym przypadku awarii podczas startu Mars Science Laboratory (MSL), jest mało prawdopodobne, że dwutlenek plutonu zostanie uwolniony i że ktoś zostanie narażony na napromieniowanie. Rodzaj plutonu zastosowany w systemie MMRTG jest inny niż plutonu stosowanego w broni jądrowej, i nie może eksplodować jak jakakolwiek bomba. Jest wytwarzany w postaci ceramicznej i nie stanowi znaczącego zagrożenia dla zdrowia, chyba że zostanie rozbity na drobne kawałki lub odparowany, a następnie wdychany lub połknięty. Osoby, które uczestniczyłyby w ewentualnym wypadku podczas startu MSL otrzymałyby średnią dawkę ok. 5–10 mrem, równą dawce, jaką otrzymuje człowiek w ciągu ok. tygodnia, skutkiem promieniowania tła.
Mimo stosowania szczególnych środków ostrożności przy postępowaniu z radioizotopowymi generatorami termoelektrycznymi, 17 kwietnia 1970 w atmosferę ziemską wszedł moduł księżycowy misji Apollo 13 z radioizotopowym generatorem termoelektrycznym. Mimo że moduł księżycowy spłonął w atmosferze, to nienaruszony pluton-238, umieszczony w grafitowym zasobniku ochronnym, zatonął w Rowie Tonga, na dnie którego leży do dzisiaj.
Moc elektryczna z MMRTG ładuje dwa akumulatory litowo-jonowe. Akumulatory umożliwiają podsystemowi zasilania sprostać największym wymaganiom poboru mocy przez działalność łazika, podczas gdy zapotrzebowanie chwilowo przekracza stały dopuszczalny poziom wyjściowy generatora. Każda z baterii ma pojemność ok. 42 amperogodzin[40].
MMRTG nie ma ruchomych części, które mogą ulec awarii lub zużyciu i w związku z tym jest wysoce niezawodnym urządzeniem zasilania energią elektryczną. MMRTG wytwarza energię elektryczną przy sprawności 6–7%. MMRTG wykorzystuje osiem modułów (źródeł energii termicznej) ang. General Purpose Heat Source (GPHS) do produkcji 110 watów energii elektrycznej i 2000 watów energii termicznej (w początkowym okresie)[41].
Ostateczne połączenie MMRTG z łazikiem nastąpiło na stanowisku startowym rakiety Atlas V. Przedtem technicy z NASA w hali obsługi niebezpiecznych ładunków, ang. Payload Hazardous Servicing Facility, sprawdzili dopasowanie MMRTG do jego stanowiska na rufie łazika. Po sprawdzeniu MMRTG został odłączony od łazika i czekał do czasu kiedy ładownia rakiety Alas V z łazikiem Curiosity w środku, została umieszczona na szczycie rakiety. Wtedy do generatora MMRTG załadowano 4,8 kg dwutlenku plutonu 238 (źródło energii termicznej) i tak uzbrojony został podniesiony w koszu zwanym „Klatką goryla” i zainstalowany w module przelotowym statku kosmicznego MSL[42].
System łączności[edytuj | edytuj kod]




Do realizacji wymiany informacji z Ziemią łazik Curiosity ma trzy anteny. Dwie zapewniają komunikację bezpośrednio z Deep Space Network w paśmie X (7 do 8 GHz). Trzecia antena zabezpiecza łączność łazika z marsjańskimi orbiterami, spełniającymi, m.in. rolę stacji przekaźnikowych z wykorzystaniem częstotliwości zakresu (UHF) (ok. 400 MHz)[43]. Podczas gdy łazik może przekazywać informacje w paśmie X bezpośrednio, to jednak wymiana informacji z Ziemią jest bardziej efektywna podczas retransmisji na falach UHF, za pośrednictwem orbiterów na orbicie Marsa, w tym NASA Odyssey i Mars Reconnaissance Orbiter, oraz Europejskiej Agencji Kosmicznej Mars Express[44]. Do łączności w paśmie X używa się 15 W, półprzewodnikowego wzmacniacza mocy, sterowanego sygnałem małego kosmicznego transpondera.
W paśmie X zastosowano antenę o dużym zysku energetycznym, w kształcie foremnego sześcioboku i o średnicy ok. 0,3 metra. Antenę zamontowano na pokładzie łazika blisko lewej krawędzi. Za pośrednictwem tej anteny są przesyłane dane z szybkością 160 bitów na sekundę do Deep Space Network, gdzie sygnał jest odbierany przez antenę o 34-metrowej średnicy, lub do anteny o średnicy 70 metrów przekazującej dane z szybkością 800 bitów na sekundę.
Antena o wysokim zysku energetycznym, która wymaga ukierunkowania, może być stosowana do nadawania lub odbierania. Antena o małym zysku energetycznym (antena dookólna), ang. Rover Low-Gain Antenna (RLGA), która nie wymaga ukierunkowania, przeznaczona jest głównie do otrzymywania wiadomości z Deep Space Network. Odbiór sygnału przez antenę o wysokim zysku energetycznym traktuje się jako typową metodę w codziennym systemie przekazywania poleceń z Ziemi do łazika. Antena UHF, ang. ultra-high frequency (RUHF), spirala ukształtowana na wzór cylindra zamontowana jest w prawym, górnym, tylnym rogu. Antena ta współpracuje z dwoma nadmiarowymi radioodbiornikami. Praca tych radioodbiorników jest zdefiniowana przez oprogramowanie, umożliwiając im autonomicznie dostosować szybkość transmisji danych do wahań siły sygnału. Używają standardowych protokołów komunikacyjnych współdziałających z wszystkimi przekaźnikami radiowymi na marsjańskich orbiterach[h], a szczególnie zgodne są z Electra UHF Radio[i][43].
Mniej więcej raz na 26 miesięcy Mars znajduje się w koniunkcji ze Słońcem, przechodząc prawie dokładnie za nim (patrząc z perspektywy Ziemi). Podczas koniunkcji Słońce zakłóca transmisje radiowe między Ziemią i Marsem. Marsjańskie koniunkcje słoneczne, nie są identyczne i zależą od trasy, którą pokonuje Mars, chowając się za Słońcem, oraz od aktywności słonecznej w czasie koniunkcji. Aktywność słoneczna w zakresie plam i rozbłysków słonecznych, zmienia się w cyklu 22-letnim. Aby zapobiec przesyłaniu komend i danych w okresie koniunkcji, kontrolerzy misji są przygotowani do zawieszenia wysyłania poleceń do statku kosmicznego na kilka tygodni. Transmisje z Marsa na Ziemię również zostają ograniczone. W okresie koniunkcji marsjańskie orbitery, jak Mars Reconnaissance Orbiter, ograniczają swoje badania na rzecz magazynowania danych z lądowników, do ich późniejszej retransmisji[45].
Komputer[edytuj | edytuj kod]
Curiosity ma dwa główne nadmiarowe komputery. Spośród dwóch komputerów nazywanych „Strona A” i „Strona B”, w danym momencie jeden z nich jest aktywny, a drugi stanowi komputer zapasowy. Większość urządzeń łazika może być sterowana przez każdą stronę, lecz kilka elementów takich jak kamery nawigacyjne są przywiązane do jednej ze stron.
Strony „A” i „B” zawierają odporne na promieniowanie procesory centralne PowerPC 750: o architekturze BAe RAD 750. Procesor działa przy prędkości dochodzącej do 200 MHz. Każdy z nadmiarowych komputerów łazika Curiosity ma po 2 GB pamięci flash, 256 megabajtów pamięci DRAM i 256 kilobajtów kasowanej elektrycznie programowalnej pamięci tylko do odczytu, ang. Electrically-Erasable Programmable Read-Only Memory EEPROM[46].
Każdy z komputerów, „Strona A” i „Strona B”, ma również inne nadmiarowe podsystemy związane tylko z odpowiednią stroną. Na trasie lotu z Ziemi na Marsa, do dnia lądowania na powierzchni Marsa, Curiosity eksploatował „Stronę B”. Przed lądowaniem w sierpniu 2012 został wprowadzony tryb aktywny dla „Strony A”.
28 lutego 2013 z powodu usterki pamięci flash, komputer został wprowadzony w tryb awaryjny. Po kilku dniach wznowiono operacje na „Stronie B”, opracowywano również, najlepszy sposób na przywrócenie „Strony A” jako realnej kopii zapasowej. Curiosity pozostał przy próbie kontynuacji utrzymania komunikacji dla wszystkich zaplanowanych okien komunikacyjnych, ale nie zostały wysłane żadne dane, lecz jedynie aktualny stan. Informacja o stanie ujawniła, że komputer nie włącza się zwykłym codziennym trybie „uśpienia”, tak jak było zaplanowane. Postępowanie diagnostyczne przeprowadzone w trybie testowania symulacji przeprowadzone na podobnym komputerze w JPL wskazuje, że w sytuację zaangażowane jest uszkodzenie pamięci na „Stronie A” w pamięci używanej do adresowania plików pamięci[47].
Kontrolny materiał organiczny[edytuj | edytuj kod]

Podjęto stosowne kroki w celu zapewnienia, aby pomiary SAM gleby i skał na Marsie nie zawierały naturalnych[j] zanieczyszczeń organicznych przywiezionych z Ziemi. Jednakże możliwe jest, że istnieje niewielka ilość zanieczyszczeń naturalnymi organicznymi substancjami ziemskimi pomimo wszelkich starań. Aby sprawdzić skuteczność tych działań i ocenić stopień zanieczyszczeń organicznych w pięciu różnych momentach misji, z przodu łazika zamontowano w pojemnikach pięć kostek kontrolnego materiału organicznego ang. Organic Check Material (OCM), które będą dostępne podczas obsługi próbek na Marsie. Każdą kostkę OCM można przewiercać, przesiewać i porcjować w CHIMRA i dostarczać do SAM (i ewentualnie również do Chemin) w formie przetworzonego proszku OCM, według tej samej procedury, co próbki marsjańskich skał.
Każda kostka jest wykonana z porowatego materiału ceramicznego, amorficznego dwutlenku krzemu, będącego chemicznym związkiem nieorganicznym, uformowanym ze współczynnikiem porowatości równym 30%. Kostki OCM są domieszkowane związkami organicznymi 3-fluoro phenanthrene i 1-fluoro napthalene o niskim stężeniu, które są syntetycznymi związkami organicznymi nie występującymi w przyrodzie na Ziemi i nie oczekuje się ich na Marsie. Każda z kostek jest zamknięta próżniowo, szczelnie we własnym pojemniku, aż do dnia wiercenia na Marsie.
Każdy pojemnik OCM jest przeznaczony do wystąpienia w roli próbki tylko raz, nieznany jest poziom reaktywności pomiędzy kostką i środowiskiem Marsa, a w wyniku ewentualnej próby nieznany jest zalecany/poprawny poziom kalibrowania instrumentów. Narastanie zanieczyszczeń na zewnętrznej powierzchni zamkniętego pojemnika nie stanowi problemu, ponieważ materiał uzyskany ~ do 1 cm głębokości kostki OCM, nie wchodzi do CHIMRA[48].
Kostki z materiału organicznego użyte będą w doświadczeniu kontrolnym, jeśli SAM wykryje jakiekolwiek związki organiczne w próbkach marsjańskiej gleby lub sproszkowanej skały. Podstawowe doświadczenie kontrolne będzie polegało na zebraniu sproszkowanej próbki z OCM i postępowaniu z próbką kontrolną według tej samej procedury, która dotyczy próbek skał marsjańskich i marsjańskiego podłoża. Jeśli SAM znajdzie jakiekolwiek związki organiczne inne niż zawierające znaczniki z fluorem, będziemy mieli pewność, że przybyły one na Marsa wraz z łazikiem Curiosity z Ziemi. Jeśli znajdą tylko związki organiczne zawierające znaczniki z fluorem, to będzie oznaczało, że szlak pozyskania i obsługi próbek przeszedł test i jest czysty od naturalnych organicznych ziemskich zanieczyszczeń[49].
Tacka obserwacyjna[edytuj | edytuj kod]


Tacka obserwacyjna umieszczona po prawej stronie przodu łazika umożliwia obserwację przez kamerę MAHLI i spektroskop APXS przetworzonych i dostarczonych próbek z CHIMRA. Tacka obserwacyjna jest prostym, płaskim metalowym krążkiem tytanu o średnicy 7,3 cm. Próbki gruntu i skał, które przeszły przez 150-mikronowe sito CHIMRA można umieścić na tacce, obserwować przez APXS lub kamerę MAHLI, a następnie usunąć z zasobnika przez szczotki urządzenia do usuwania kurzu DRT. Po dostarczeniu przesianego materiału (gruntu lub skał) do SAM i / lub Chemin, pozostała część przesianego materiału może być analizowana w ten sposób[50].
Sol[edytuj | edytuj kod]
.svg)
1 → 2 doba gwiazdowa, 1 → 3 doba słoneczna
Opis do rysunku obok.
Z lewej: gwiazda x (małe czerwone koło) i Słońce górują na południku niebieskim. Centrum: tylko gwiazda x góruje na południku niebieskim (doba gwiazdowa). Z prawej: kilka minut później Słońce góruje na południku niebieskim. Minęła doba słoneczna lub Sol.
Po wieloletniej praktyce pierwotnie przyjętej w 1976 r. przez misję Viking Lander, dzienna zmiana czasu słonecznego na Marsie jest liczona w kategoriach zegara „24-godzinnego”, reprezentującego 24-częściowy podział dnia słonecznego planety, wraz z tradycyjnym podziałem godziny na 60 minut i minuty na 60 sekund[k]. Marsjański dzień słoneczny ma średnio okres 24 godzin 39 minut 35,244 sekund i jest zwyczajowo określany jako „Sol”, w celu odróżnienia go od ok. 3% krótszego dnia słonecznego na Ziemi, który ma dokładnie 24 godziny.
Marsjański dzień gwiazdowy, mierzony w odniesieniu do gwiazd stałych (odległych), ma 24 godziny 37 minut 22,663 sekund, w porównaniu z 23 godzinami 56 minutami 04,0905 sekundami dla ziemskiego dnia gwiazdowego. W misji Mars Science Laboratory jako Sol 0 został ustalony ten marsjański dzień, w którym lądownik wylądował na Marsie, a było to 5 sierpnia 2012 roku[51].
Mars ma nachylenie osiowe i okres rotacji podobny do ziemskiego, zatem doświadcza podobnych pór roku jak Ziemia, czyli lata, jesieni i zimy, a jego dzień ma podobną długość. Jego rok, jednakże, jest prawie dwa razy dłuższy niż na Ziemi.
Marsjański orbitalny mimośród jest znacznie większy, co oznacza między innymi, że długości pór marsjańskich wzajemnie znacznie się różnią. Według konwencji używanej przez lądowniki kosmiczne, jak do tej pory, aby śledzić lokalny czas słoneczny za pomocą 24 godzinego „zegara marsjańskiego”, jego godziny, minuty i sekundy są o 2,7% dłuższe niż ich standardowe, ziemskie, odpowiedniki[52].
Trasa łazika[edytuj | edytuj kod]



Trasa, jaką przebył łazik Curiosity od miejsca lądowania (Bradbury Landing) 5 sierpnia 2012, PDT (6 sierpnia 2012 UT i EDT, ang. Eastern Daylight Time) a pozycją uzyskaną w 351 marsjańskim dniu lub Sol 351 (1 sierpnia 2013), wynosi 1686 metrów.
Teren, na którym pracuje łazik Curiosity znajduje się w kraterze Gale na północ od góry Aeolis Mons znajdującej się w środku krateru. Po pierwszych użyciach wiertarki, głównym celem podróży łazika będą okolice podnóża góry Aeolis Mons. Zdjęcie PIA16064 pokazuje szeroki kontekstowo obraz trasy łazika[53].
Curiosity wylądował wewnątrz krateru Gale, miejsce to jest oznaczone zieloną kropką, w czworokącie obszaru Yellowknife. Miejsce to zostało wybrane aby umożliwić poruszanie się do regionu oznaczonego niebieską kropką, który jest nazywany Glenelg. Obszar ten wyznacza punkt przecięcia trzech rodzajów terenu. Następnie łazik będzie poruszać się w kierunku miejsca oznaczonego niebieską kropką z napisem Base of Mount Sharp[l], będącego naturalnym przełomem w wydmach, który pozwoli Curiosity rozpocząć badanie podnóża góry Aeolis Mons[54].
Skarpa w „Yellowknife Bay”[edytuj | edytuj kod]



Łazik Curiosity dokonał pomiarów wskazujących, że skała Cumberland wiercona w maju 2013 została wyeksponowana na powierzchnię Marsa ok. 80 mln lat temu. Patrząc wstecz więcej niż 80 mln, miejsce wiercenia było pokryte 3 metrową warstwą skały, tak jak pokazuje rysunek górny. 80 mln lat temu (środkowy panel), Cumberland został wystawiony na powierzchnię, gdy skarpa wycofała się ze względu na ścieranie jej przez nawiew piasku. Średnie tempo erozji boków skarpy i jej cofanie wystąpiło w średnim tempie ok. 1 metr na milion lat.
Wzorzec ten, sugeruje, że najmłodszy wiekiem materiał powierzchni ekspozycyjnej i o najmłodszej ekspozycji promieniowania kosmicznego znajduje się u podstawy nawietrznej skarpy. Zrozumienie tej reguły daje zespołowi łazika Curiosity wgląd w wybór przyszłych obiektów mających być celem wierceń poszukujących związków organicznych zachowanych w marsjańskich skałach[55].
Lewe zdjęcie ukazuje geologiczne elementy formacji Yellowknife Bay, oraz miejsca gdzie łazik Curiosity realizował wiercenia najniżej położonych skał, nazwanych Sheepbed, „John Klein” i „Cumberland.” Na pierwszym planie znajduje się mułowiec Sheepbed i wznosi się przez obszar Gillespie Lake do wychodni Point Lake. Skały tutaj przedstawione zostały odkryte ok. 70 mln lat temu poprzez usunięcie warstw wierzchnich energią piasku przesuwanego przez wiatr[56].
Zdjęcie będące mozaiką obrazów jednego z dwu aparatów fotograficznych pracujących w systemie [[Curiosity Rover#Kamery masztowe|ang. Mast Camera (Mastcam)]], instrumentu znajdującego się na pokładzie należącego do NASA marsjańskiego łazika Curiosity ukazuje serię osadów sedymentacyjnych na obszarze Glenelg w kraterze Gale, z punktu widzenia zatoki Yellowknife, patrząc w kierunku zachodnio-północno-zachodnim.
Zespół naukowy kierujący pracą łazika Curiosity oszacował, że skała „Cumberland” wiercona w celu uzyskania próbki ze złoża mułowca Sheepbed (z dołu po lewej stronie) została wystawiona na powierzchnię tylko ok. 80 mln lat temu. Oszacowania opierają się na zawartości pewnych gazów gromadzących się w skałach znajdujących się na tyle blisko powierzchni, aby być wystawionymi na bombardowanie przez promieniowanie kosmiczne. Wyjaśnienie tego niespodziewanie młodego wieku ekspozycji, pochodzi z lepszego zrozumienia procesu erozji, odsłaniającej warstwy leżące u podstawy. Zaproponowane wyjaśnienie sugeruje, jak wskazują strzałki, że mułowiec jest narażony na ścieranie przez piasek gnany wiatrem. Rola wiatru jest wysoce sugerowana przez podcięcia warstwy Sheepbed poniżej piaskowca Gillespie Lake[57].
Łazik Curiosity opuścił obszar „Glenelg” 4 lipca 2013 r., wstępując na „trasę szybkiego marszu” prowadzącą do „punktu wejścia” (na zdjęciu Entry Point) w następne zadanie misji, czyli, osiągnięcie dolnych warstw Aeolis Mons. Do 27 sierpnia 2013 łazik Curiosity przebył 1,39 km od momentu opuszczenia Glenelg, z ok. 7,18 km pozostałych, które trzeba pokonać, aby dotrzeć do orientacyjnego punktu wejścia (Entry Point). Przejazd łazika 27 sierpnia 2013, czyli w 376 Sol misji, był pierwszym przypadkiem, kiedy to łazik Curiosity użył autonomicznego systemu nawigacji, który umożliwia bezpieczne poruszanie się poza obszarem, na którym łazik był sterowany przez kierowców z Ziemi. Podczas nawigacji autonomicznej łazik może ocenić przyszłą trasę ze zdjęć kamer Navcams i Hazcams. Łazik potrafi analizować obrazy stereoskopowe, które pobiera w trakcie jazdy i wybiera najlepszą drogę.
„Trasa szybkiego marszu” została wykreślona na podstawie zdjęć teleskopu High Resolution Imaging Science Experiment (HiRISE). Aktualne przebiegi łazika powstają w oparciu o obrazy z kamer własnych, i w związku z tym całkowita odległość jazdy do punktu wejścia (Entry Point) może różnić się od długości „trasy szybkiego marszu”.
Naukowy zespół łazika Curiosity wskazał kilka geologicznych punktów kontrolnych wzdłuż „trasy szybkiego marszu”, gdzie kontynuacja marszu może zostać przerwana na kilka Sol, aby dać czas na studiowanie lokalnych cech terenowych. Łazikowi 27 sierpnia 2013 pozostało 500 metrów do osiągnięcia pierwszego z tych punktów[58].
Przystanek 1[edytuj | edytuj kod]


Przystanek 1 (ang. waypoint 1) znajduje się w miejscu odkrywek o nazwie „Darwin” i jest pierwszym z pięciu planowanych przystanków na trasie między obszarem „Glenelg” a punktem wejścia do dolnego stoku Aeolis Mons, który jest głównym celem tego etapu. Łazik opuścił Waypoint 1 22 września 2013, oddalając się w kierunku zachodnim o 22,8 m.
Naukowcy pragną zrozumieć historię wody w kraterze Gale. Analizując osady zdeponowane w kamienistym piaskowcu na przystanku 1 i w słojowaniu skał Yellowknife Bay, stwierdzono, że osady mają różny skład, co jest niezgodne z oczekiwaniami i komplikuje ewentualne hipotezy pochodzenia wody w kraterze Gale[59].
Dingo Gap[edytuj | edytuj kod]







Na trasie do dolnych zboczy wzniesienia Aeolis Mons łazik Curiosity musiał pokonać lukę „Dingo Gap”, co umożliwiło dotarcie do doliny położonej na zachodzie. Dolina ta została zaakceptowana przez zespół łazika jako trasa przejazdu, mająca mniej ostrych skał niż inne rozważane trasy. W celu oceny wyboru trasy posłużono się zdjęciami kamer łazika, jak również orbitalnymi zdjęciami z kamery HiRISE znajdującej się na należącym do NASA orbiterze Mars Reconnaissance Orbiter. Curiosity przekroczył wydmę „Dingo Gap” w 535 marsjańskim dniu pracy łazika na Marsie (na Ziemi był wtedy 6 lutego 2014).
Kimberley[edytuj | edytuj kod]




Łazik Curiosity po przebyciu trasy zaczynającej się w punkcie „Bradbury Landing”, czyli na pozycji, w której wylądował 5 sierpnia 2012, dotarł 1 kwietnia 2014 roku do punktu kontrolnego nazywanego „Kimberley”. Było to w 589 marsjańskim dniu pracy łazika na Marsie. Od momentu lądowania do przybycia do Kimberley łazik przebył 6,1 km[69].
Kimberley (wcześniej nazywane „KMS-9”) wybrane było jako ważny naukowy punkt kontrolny, z powodu występującego na tym stanowisku, dużego zróżnicowania skał, rozpoznawanego w obrazach z orbity, ułożonych względem siebie w czytelnym geologicznym porządku.
Mount Remarkable[edytuj | edytuj kod]


Zespół naukowy kierujący pracą łazika w punkcie „Kimberley” przypatruje się warstwie skalnej otaczającej podstawę niewielkiego pagórka nazwanego „Mount Remarkable,” jako obiektowi przeznaczonemu do badań przy użyciu narzędzi umieszczonych na wieżyczce obrotowej przegubowego ramienia. Łazik znajduje się blisko tego pagórka na zdjęciu wykonanym 11 kwietnia 2014 r. przy pomocy instrumentu (HiRISE) znajdującego się na pokładzie należącego do NASA orbitera Mars Reconnaissance Orbiter.
Pagórek ma ok. 5 metrów wysokości. Zespół naukowy łazika Curiosity odnosi się do warstwy skalnej otaczającej podstawę pagórka „Mount Remarkable” jako do „jednostki pośredniej”, ponieważ jej lokalizacja jest przejściowa między skałami, które formują pagórek w terenie, a nisko leżącymi skałami tworzącymi wzór prążków.
W zależności od tego, jakie wnioski wyciągną naukowcy z obserwacji zbliżeń skał i z identyfikacji ich chemicznych składników, miejsce na skale przejściowej (middle unit) może stać się trzecią skałą poddaną zmieleniu przez wiertarkę udarową Curiosity. Pierwsze dwie próbki zmielonych skał otrzymano na obszarze nazywanym Yellowknife Bay, blisko miejsca lądowania.
Aktualne położenie łazika w otoczeniu różnego rodzaju skał wyeksponowanych blisko siebie jest nazywane „Kimberley.” Właśnie tutaj i na przyszłych odkrywkach, na stoku Mount Sharp wewnątrz krateru Gale, naukowcy planują wykorzystać możliwości Curiosity, aby dowiedzieć się więcej o ewentualnej możliwości istnienia kolebki życia i zmian w środowisku Marsa w przeszłości[70].
Windjana[edytuj | edytuj kod]





Zespół łazika Curiosity zaplanował jego użycie w celu zbadania zbudowanej z piaskowca płyty skalnej, nazwanej „Windjana”. Skała pochodzi z wychodni różniących się opornością na wiatr, co w efekcie powoduje tworzenie wzoru skalnych schodów. Do zbadania płyty były użyte narzędzia umieszczone na wieżyczce obrotowej wysięgnika przegubowego. Kamery zamontowane na maszcie służyły w pomocy do podjęcia decyzji o użyciu wiertarki. Płyta skalna „Windjana” znajduje się w podstawie pagórka „Mount Remarkable”. Zdjęcie skały zostało wykonane przez lewy obiektyw kamery masztowej podczas 609 marsjańskiego dnia misji łazika na Marsie, na Ziemi był wtedy 23 kwietnia 2014 r.[71]
W 612 marsjańskim dniu misji łazika Curiosity na Marsie, na Ziemi był wtedy 26 kwietnia 2014 r., została użyta mechaniczna szczotka ang. Dust Removal Tool (DRT), będąca jednym z pięciu narzędzi zamontowanych na wieżyczce obrotowej przegubowego wysięgnika. Szczotka z metalowego włosia została użyta do usunięcia kurzu z płyty piaskowca ‘Windjana’. Odkurzona powierzchnia ma średnicę 6 cm. Szczotkowanie odsłoniło szary kolor płyty, który kontrastuje z czerwonawą warstwą kurzu.
Odkurzanie płyty jest jej przygotowaniem do wiercenia, które z kolei jest jedną z operacji tworzenia próbki zmielonej skały. Wysięgnik przegubowy łazika dostarcza porcję próbki do analiz laboratoryjnych instrumentów pokładowych (SAM i CheMin). Dotychczas łazik Curiosity używał wiertarki dwa razy, w miejscach „John Klein” i „Cumberland”[72].
Podczas 615 marsjańskiej doby pracy Curiosity na Marsie (29 kwietnia 2014), łazik wykonał płytkie wiercenie będące częścią oceny skały, nazywanej „Windjana”, pod względem możliwości przeprowadzenia głębszego wiercenia, w celu uzyskania sproszkowanej skały z jej wnętrza, jako próbki do badań. Testowy otwór ma średnicę 1,6 cm i ok. 2 cm głębokości. Podczas zbierania próbki udarowa wiertarka łazika wierci na głębokość 6,4 cm. Przygotowawcza działalność umożliwia zespołowi łazika oszacować wzajemne oddziaływanie między wiertłem i tą szczególną skałą, i zobaczyć wnętrze potencjalnym próbek, i odpadów przeróbczych[73].
13 maja 2014 kamera MAHLI wykonała nocne zdjęcie wnętrza roboczego otworu wykonanego w skale ‘Windjana’. Do oświetlenia kamera użyła białych diod LED. Na ścianie wnętrza otworu widać linię blizn wykonanych strzałami lasera instrumentu Chemcam. Zespół łazika Curiosity postanowił nie wiercić innych skał w tym punkcie trasy. W najbliższych dniach, Curiosity wznowi jazdę ku górze Aeolis Mons. Łazik niesie ze sobą porcję sproszkowanego materiału próbki z płyty piaskowca ‘Windjana’, który będzie dostarczony do analiz laboratoryjnych podczas przerwy na trasie[74].
Meteoryt żelazny[edytuj | edytuj kod]

Łazik Curiosity napotkał meteoryt żelazny zwany „Liban”, którego kształt i połysk podobny jest do żelaznych meteorytów znalezionych na Marsie przez łaziki poprzedniej generacji, a konkretnie przez Spirit i Opportunity. Liban ma ok. 2 m szerokości (od lewej do prawej, patrząc od przodu). Mniejszy kawałek na pierwszym planie jest nazywany „Liban B”.
Zdjęcie meteorytu jest połączeniem szeregu okrągłych wysokiej rozdzielczości zdjęć wykonanych przez aparat fotograficzny Remote Micro-Imager (RMI) będący częścią instrumentu ChemCam i jednego z dwu aparatów fotograficznych kamer masztowych który dostarczył informacji o kolorze i szerszego kontekstu. Obrazy składowe zostały wykonane podczas 640 marsjańskiej doby, pracy łazika na Marsie (25 maja 2014).
Zdjęcie pokazuje kątowo ukształtowane wgłębienia na powierzchni skały. Jednym z możliwych wyjaśnień kątowo ukształtowanych wgłębień jest to, że preferencyjna erozja zachodzi wzdłuż granic krystalicznych metalu zawartego w skale. Inna możliwością jest taka iż wgłębienia raz powstałe w kryształach oliwinu, który był znalazł się w rzadkim typie kamienno żelaznego meteorytu nazywanego pallasyt, uważa się, że został utworzony wewnątrz asteroidy w pobliżu granicy rdzeń-płaszcz.
Żelazne meteoryty nie są rzadkością wśród meteorytów znajdywanych na Ziemi, lecz są one mniej popularne od meteorytów kamiennych. Na Marsie żelazne meteoryty dominują wśród małej liczby ogólnie znalezionych meteorytów. Częściowym wyjaśnieniem mogą być niekorzystne warunki dla erozji meteorytów żelaznych panujące na Marsie[75].
Winnipesaukee[edytuj | edytuj kod]

Naukowcy, używając instrumentu ChemCam znajdującego się na maszcie łazika Curiosity 8 czerwca 2014 (654 marsjańskiego dnia), dokonali zbadania marsjańskiej skały „skorupa” o przekroju ok. 3 cm, scementowanej z drobnoziarnistą skałą i z wnętrzem wypełnionym po części kurzem. Przedstawiony obraz jest połączeniem zdjęcia obiektu nazywanego „Winnipesaukee,” z wykresem wyników spektrografu analizującego obłoki plazmy powstałe po serii lasera układającej się w rząd, skierowanej do skały, matrycy (skorupy) wokół niej i materiału (kurzu) wypełniającego matrycę.
Powstałe zdjęcie łączy wysokiej rozdzielczości czarno białe zdjęcie z aparatu przystosowanego do wykonywania zdjęć makro obiektów oddalonych do 7 metrów od obiektywu i kolorowego zdjęcia zrobionego przez prawy aparat (z teleobiektywem 100 mm), jednej z dwu kamer masztowych. Laser wchodzący w skład urządzenia ChemCam i aparaty fotograficzne znajdujące się na zdalnie sterowanym maszcie, znajdowały się 3 metry od obiektu Winnipesaukee. Struktury o podobnych cechach zaobserwowano wcześniej w tej misji, ale tym razem ChemCam był w stanie dostarczyć analizę chemiczną badanej struktury. Laserowe działko oddało 30 strzałów w każdą z 10 pozycji oznakowanych przez czarne, czerwone i zielone kółka. Analizowane były trzy różne typy materiałów: podłoże skalne z każdej strony struktury, materiał z którego jest zbudowana skorupa i kurz wypełniający pustą przestrzeń. Kolory linii na wykresie poniżej zdjęcia odpowiadają kolorom okręgów wskazujących zaznaczone lokalizacje laserowych strzałów.
Analiza widm podłoża (czarne kółka) zidentyfikowała wysoki poziom tlenków krzemu, glinu i sodu, asocjacji typowych dla kompozycji skaleniowych. Materiał tworzący „skorupę” (czerwone okręgi) ma bardziej bazaltową kompozycję, o wyższej zawartości żelaza i magnezu. Pył (zielone kółka) zgromadzony w pustej przestrzeni, z dużą dozą prawdopodobieństwa można określić, że został naniesiony przez wiatr. Pył ten zawiera stosunkowo wysoki identyfikator wodoru (woda), w porównaniu do innych materiałów marsjańskich, sygnaturę zazwyczaj charakterystyczną dla wszechobecnego pyłu tworzącego cienki płaszcz na wielu powierzchniach.
Naukowcy rozważają kilka hipotez o tym, jak taka pusta struktura powstaje. Nie można wykluczyć powstawania struktury od bańki lub skorupy skały, która została wbudowana do otaczającego osadu. Jedną z bardziej prawdopodobnych możliwości jest ta, mówiąca że transport płynów przez skałę macierzystą mógł powodować powstawanie struktur rurowych ze ścianką obejmującą podłoże skalne. Inną możliwością jest ta, że struktura powstaje z powodu szczelin przenikających podłoże skalne, następnie cement mineralny wypełniania szczeliny a erozja wiatru usuwa z wnętrza materiał[76].
Pierwszy marsjański rok[edytuj | edytuj kod]



Mapa po lewej stronie ukazuje w czerwonym kolorze trasę, jaką przebył łazik Curiosity od „Bradbury Landing”, miejsca lądowania w sierpniu 2012 roku (niebieska gwiazda w prawym rogu) do punktu, który łazik osiągnął po pierwszym marsjańskim roku pobytu na czerwonej planecie (zielona gwiazda). Linia biała oznacza przyszłą trasę planowaną.
24 czerwca 2014 roku minął marsjański rok pracy łazika Curiosity na Marsie. Marsjański rok liczy 669 marsjańskich dni i 687 ziemskich dni.
Punkt „Murray Buttes” (biała gwiazda) został wybrany jako przejście do dolnych zboczy góry Aeolis Mons, ponieważ stanowi on wyłom w paśmie ciemno stonowanych pól wydmowych stanowiących zaporę na drodze do podnóży góry. Biała linia na mapie wskazuje planowaną trasę do „Murray Buttes” wybraną wiosną 2014 jako najbezpieczniejszą drogę dla kół łazika. Na trasie pomiędzy planowanymi i zaznaczonymi na mapie punktami „Cooperstown” i „Kimberley”, ostre skały spowodowały w końcu 2013 roku nieoczekiwane przyspieszenie tempa zużycia kół. Trasa oznaczona białą linią omija pewne odcinki podobnego terenu na uprzednio planowanej, położonej bardziej na północ trasie prowadzącej do „Murray Buttes”[77].
Bonanza King[edytuj | edytuj kod]





717 marsjańskiego dnia (12 sierpnia 2014) podczas zejścia łazika Curiosity piaszczystą rampą w dolinę ‘Hidden Valley’, na północno-wschodnim jej krańcu, koła łazika niespodziewanie doznały wysokiego poślizgu. Zespół łazika z obawy o kondycję kół postanowił wyjechać z doliny rampą po której do niej wjechał, do wyższej lokalizacji w celu rozpatrzenia ewentualnej innej trasy. Na rampie znajdował się obiekt ‘Bonanza King’ będący kandydatem do wiercenia. Zostało przeprowadzone testowe wiercenie skały, aby sprawdzić czy obiekt będzie akceptowalny do pobrania próbki[83].
Dalsza analiza wykazała, że skała poruszała się podczas procedury kontrolnej i nie przechodzi testu. 21 sierpnia 2014 roku zespół łazika postanowił opuścić miejsce Bonanza King i powrócić do wędrówki w kierunku Aeolis Mons, a być może zostanie wybrany krótkoterminowy plan, którego miejscem przeznaczenia będzie wychodnia „Pahrump Hills”[84]
Pahrump Hills[edytuj | edytuj kod]




24 września 2014 udarowa wiertarka łazika wydobyła próbkę z głębokości 6,7 cm wychodni warstwy podstawnej Mount Sharp i zachowała uzyskaną próbkę pyłu skalnego. Zgromadzony w wyniku wiercenia proszek skalny jest tymczasem przechowywany wewnątrz urządzenia zbierającego próbki i umieszczonego na końcu przegubowego wysięgnika łazika (CHIMRA). Poddana wierceniu skała znajduje się na najniższej części warstwy bazowej góry, gdzie zaczyna się realizacja planu zbadania wyższych, młodszych, odsłoniętych warstw na pobliskich wzgórzach.
Pierwsze spojrzenie na skały pozwala wierzyć, że są to podstawy góry Aeolis Mons, a to zaczyna tworzyć obraz środowiska z czasów kiedy góra była formowana, i co doprowadziło do jej wzrostu.
Curiosity przybył 19 września 2014 do wychodni nazywanej „Pahrump Hills,” która jest częścią podstawnej jednostki geologicznej masywu górskiego, zwanej formacją „Murray”. Trzy dni później łazik ukończył testową procedurę wybranego celu wiercenia, „Confidence Hills,” aby ocenić przydatność skały do ostatecznego wiercenia. Działalność testowa wiertarki i obiektów wyznaczonych do wiercenia w zeszłym miesiącu wykazała, że płyta skały brana pod uwagę nie była wystarczająco stabilna do pełnej wiercenia, ale nie dotyczyło to „Confidence Hills”, która ostatecznie przeszła ten test. Skała jest bardziej miękka niż którakolwiek z poprzednich trzech celów, od których Curiosity zebrał próbki do analizy.
Między wierceniem testowym i wierceniem finalnym, naukowcy wykorzystali instrumenty na maszcie łazika Curiosity i na końcu ramienia przegubowego wysięgnika do wykonania zbliżenia i kontroli geometrycznie wyróżniających się wzorów na pobliskiej powierzchni skały.
Wzory te ukształtowane na powierzchni mułowców formacji Murray, są nagromadzeniem materiałów odpornych na działanie erozji. Występują one zarówno jako klastry[m] dyskretne, jak i klastry dendrytów, w którym formy są umieszczone w drzewiastych rozgałęzieniach. Badając kształty i skład chemiczny tych tworów, zespół ma nadzieję na uzyskanie informacji na temat ewentualnego składu płynów w tym miejscu dawno temu na Marsie.
Następnym krokiem będzie dostarczanie próbek pyłu skalnego na małym czerpaku zamontowanym na przegubowym ramieniu łazika, jako element urządzenia CHIMRA. Obserwowanie tekstury proszku w otwartym czerpaku, umożliwia ocenę, czy jest to bezpieczne dla dalszego przesiewania, porcjowania i dostawy do wewnętrznych instrumentów laboratoryjnych łazika Curiosity bez zatykania sprzętu[85].
Kamera HiRISE ukazuje zdjęcia na których przejście dla łazika Curiosity pomiędzy formacją „Murray”, w której warstwy są słabo widoczne i trudne do śledzenia z orbity, i grzbietem hematytu, który składa się z warstw ciągłych, mogących być zlokalizowanymi poprzecznie do trasy łazika na dystansie kilkuset metrów. Dane orbitalne pokazują, że tej zmianie w modelu podłoża między formacją „Murray” i grzbietem hematytu towarzyszą również istotne zmiany w składzie warstwy. Łazik Curiosity będzie te geologiczne formacje badał[86].
Potwierdzenie zasadności mapowania z orbity[edytuj | edytuj kod]
Czerwonawy skalny proszek z pierwszego otworu wywierconego w marsjańskiej górze przyniósł pierwsze potwierdzenie minerału odwzorowanego/mapowanego z orbity.
Ramię robota dostarczyło szczyptę próbki do instrumentu Chemin znajdującego wewnątrz łazika. Próbka ta, pochodzi z obiektu o nazwie „Confidence Hills”, w ramach odkrywki „Pahrump Hills”, zawiera znacznie więcej hematytu, niż jakikolwiek inne próbki skalne, lub próbki podłoża analizowane poprzednio przez instrument Chemin podczas dwóch lat misji. Hematyt jest tlenkiem żelaza mineralnego, który daje wskazówki na temat dawnych warunków środowiskowych[87].



Sol957[edytuj | edytuj kod]


16 kwietnia 2015 roku łazik przekroczył 10 km łącznej jazdy, licząc od jego lądowania na Marsie 5 sierpnia 2012 roku, w tym ok. 310 metrów w tym miesiącu. Wydarzenie miało miejsce w 957 marsjańskim dniu misji łazika Curiosity lub w Sol957. Łazik poruszał się przez szereg płytkich dolin pomiędzy odkrywką „Pahrump Hills”, która była badana przez sześć miesięcy, a następnym celem naukowymi, „Logan Pass”, do którego zostało jeszcze ok. 200 metrów, do przodu w kierunku południowym[88].
Galeria[edytuj | edytuj kod]
-
 Pokład łazika Curiosity
Pokład łazika Curiosity
PIA14131-deckpan-full.jpg Dostęp do zdjęcia z adnotacjami -
 Wychodnia skalna na obszarze Glenelg
Wychodnia skalna na obszarze Glenelg -
 Podłoże podejrzane o transport wody w przeszłości
Podłoże podejrzane o transport wody w przeszłości -

-
 Nie wiadomo co tam leży, ale na pewno nie pochodzi to z Marsa
Nie wiadomo co tam leży, ale na pewno nie pochodzi to z Marsa -
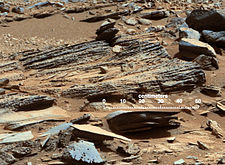 Wielkości ziaren są tu na tyle grube, aby wykluczyć ich przemieszczanie się siłą wiatru
Wielkości ziaren są tu na tyle grube, aby wykluczyć ich przemieszczanie się siłą wiatru -
 Miejsce na Marsie Goulburn
Miejsce na Marsie Goulburn -
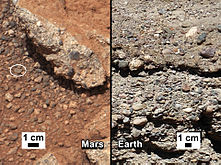 Miejsce na Marsie Link
Miejsce na Marsie Link -
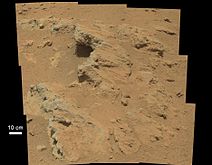 Miejsce na Marsie Hottah
Miejsce na Marsie Hottah -
 Miejsce na Marsie Rocknest
Miejsce na Marsie Rocknest -
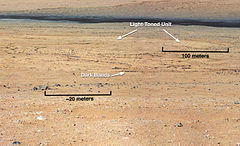
-
 Miejsce na Marsie John Klein
Miejsce na Marsie John Klein -
 Pierwsze spojrzenie kamery łazika Curiosity na minerały, które powstały w wodzie na drodze perkolacji w środowisku podpowierzchniowym
Pierwsze spojrzenie kamery łazika Curiosity na minerały, które powstały w wodzie na drodze perkolacji w środowisku podpowierzchniowym -
 Erozja w wyniku cofania się skarpy w kraterze Gale
Erozja w wyniku cofania się skarpy w kraterze Gale -
 Marsjańska skała ‘Harrison’
Marsjańska skała ‘Harrison’ -
 Świetlny punkt na Marsie
Świetlny punkt na Marsie


.jpg)












Uwagi[edytuj | edytuj kod]
- ↑ W dalszej części artykułu element łączący wózek z kołem przednim i kadłubem łazika, w związku z brakiem polskiego odpowiednika będzie nazywany rockerem.
- ↑ Jeżeli jeden rocker wykonuje obrót zgodnie z ruchem wskazówek zegara wokół osi obrotu, to drugi rocker musi wykonywać obrót zgodny z ruchem przeciwnym do ruchu wskazówek zegara.
- ↑ Teleskopowa kamera w innych komentarzach nazywana jest zdalną kamerą i obydwie nazwy odnoszą się do urządzenia wykonującego zdjęcia makro z odległości do 7 metrów.
- ↑ Im niższa jest zdolność rozdzielcza kamery, tym bliższe kamerze punkty są rejestrowane jako jedna plama, a nie jako odrębne punkty.
- ↑ W tym przypadku zaistniała konieczność wykonywania zdjęć makro z bezpiecznej odległości ze względu na zagrożenia wynikające z działania wiązki lasera na badane obiekty.
- ↑ Sol 31 oznacza 31 marsjański dzień, licząc od dnia lądowania (5 sierpnia 2012) łazika Curiosity na powierzchni Marsa. Więcej: Sol (doba marsjańska).
- ↑ Globalny pływ masy ogrzanej atmosfery przez promieniowanie podczerwone Słońca.
- ↑ 2001 Mars Odyssey, Mars Express Orbiter, Mars Reconnaissance Orbiter.
- ↑ Electra UHF Radio to pierwsze progamowalne radio wysłane w głęboką przestrzeń kosmiczną.
- ↑ Naturalne – stworzone przez przyrodę.
- ↑ W tej chwili jest mowa o ziemskich jednostkach upływu czasu, w odróżnieniu od jednostek zegara marsjańskiego, które mają takie same nazwy, ale są dłuższe o 2,7%.
- ↑ Mount Sharp to poprzednia nazwa Aeolis Mons.
- ↑ Grona, kiście, wiązki, gromadki.
Przypisy[edytuj | edytuj kod]
- ↑ a b c Łukasz Żmijewski: Marsjańska misja Curiosity. T. 53. Poznań: Oxford Educational Sp. z o.o., 2012, s. 14–19, seria: Kosmos. Tajemnice Wszechświata. ISBN 978-83-252-1674-0.
- ↑ Mars wzywa nas. vigo.com.pl. [zarchiwizowane z tego adresu (2012-08-16)]..
- ↑ Weronika Śliwa, „Wiedza i Życie” (933), Warszawa: PruszyńskiMedia, 2012, s. 10–11.
- ↑ Gale Crater’s History Book. NASA. [dostęp 2013-01-17]. (ang.).
- ↑ a b Mars Science Laboratory Launch. [w:] Rover Mobility [on-line]. NASA, listopad 2011. s. 40. [dostęp 2012-09-28]. (ang.).
- ↑ Mars Rover Rocker-Bogie Differential. [w:] Differential Bar [on-line]. Astroinfo, July 23rd, 2012. [dostęp 2012-10-04]. (ang.).
- ↑ New Mars Rover to Feature Morse Code. American Radio Relay League (ARRL), 2011-03-29. [dostęp 2013-09-22]. (ang.).
- ↑ Whitney Clavin: Mars Descent Imager (MARDI). NASA, 2012-03-08. [dostęp 2012-08-24]. (ang.).
- ↑ a b c Mars Science Laboratory Launch. [w:] Mast Camera (Mastcam) [on-line]. NASA, listopad 2011. s. 11. [dostęp 2012-09-28]. (ang.).
- ↑ a b Jeff Mather: Jeff Mather’s Dispatches. [w:] Adding L* to RGBG [on-line]. Jeff Mather Photography, 2008-05-13. [dostęp 2012-09-26]. (ang.).
- ↑ Łukasz Kacperczyk: Matryca Światłoczuła. Szeroki Kadr. [dostęp 2012-10-24]. [zarchiwizowane z tego adresu (2012-10-17)]. (pol.).
- ↑ Mars Science Laboratory Launch. [w:] Mars Descent Imager (MARDI) [on-line]. NASA, listopad 2011. s. 22. [dostęp 2012-09-10]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Mars Hand Lens Imager (MAHLI) [on-line]. NASA, listopad 2011. s. 15. [dostęp 2012-09-12]. (ang.).
- ↑ Denise Lineberry: Beam Mars Up, RTIMS: NASA Langley-developed Technology on Curiosity. NASA Langley Research Center, 2012-01-08. [dostęp 2012-08-27]. (ang.).
- ↑ Tony Greicius: Body and Mast Units of ChemCam Instrument. NASA. [dostęp 2012-08-30]. (ang.).
- ↑ Roger C. Wiens, Sylvestre Maurice: Chemistry & Camera (ChemCam)/LIBS Instrument. NASA, 2013-05-14. [dostęp 2013-05-14]. [zarchiwizowane z tego adresu (2011-07-20)]. (ang.).
- ↑ Rover’s Laser Instrument Zaps First Martian Rock. NASA, Jet Propulsion Laboratory, Pasadena, Calif., 2012-08-19. [dostęp 2012-08-31]. (ang.).
- ↑ PI: Roger C. Wiens, Los Alamos National Laboratory Deputy PI: Sylvestre Maurice, CESR, France: Chemistry & Camera (ChemCam)/RMI Instrument. NASA, 2013-05-14. [dostęp 2013-05-14]. [zarchiwizowane z tego adresu (2011-07-20)]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Chemistry and Mineralogy (CheMin) [on-line]. NASA, listopad 2011. s. 15. [dostęp 2012-09-09]. (ang.).
- ↑ NASA: Shake it up, CheMin. [w:] the cells that hold the soil samples that are vibrated by the Chemistry and Mineralogy (CheMin) [on-line]. NASA, 2012-10-29. [dostęp 2012-11-02]. (ang.).
- ↑ The Five Most Abundant Gases in the Martian Atmosphere. NASA, październik 2012. [dostęp 2012-11-16]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Sample Analysis at Mars (SAM) [on-line]. NASA, listopad 2011. s. 17. [dostęp 2012-09-10]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Rover Environmental Monitoring Station (REMS) [on-line]. NASA, listopad 2011. s. 19. [dostęp 2012-09-16].
- ↑ Rover Environmental Monitoring Station (REMS). NASA – Jet Propulsion Laboratory. [dostęp 2012-11-03]. [zarchiwizowane z tego adresu (2011-07-20)]. (ang.).
- ↑ Thermal Tides at Mars. NASA, 2012-11-15. [dostęp 2012-11-20]. (ang.).
- ↑ Pressure Cycles on Mars. NASA, 2012-11-15. [dostęp 2012-11-21]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Radiation Assessment Detector (RAD) [on-line]. NASA, listopad 2011. s. 20. [dostęp 2012-09-12]. (ang.).
- ↑ Sensor on Mars Rover to Measure Radiation Environment. NASA, 2010-09-11. [dostęp 2012-11-13]. (ang.).
- ↑ Daily Cycles of Radiation and Pressure at Gale Crater. NASA, 2012-11-15. [dostęp 2012-11-23]. (ang.).
- ↑ Longer-Term Radiation Variations at Gale Crater. NASA, 2012-11-15. [dostęp 2012-11-23]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Dynamic Albedo of Neutrons (DAN) [on-line]. NASA, listopad 2011. s. 21. [dostęp 2012-09-12]. (ang.).
- ↑ Tony Greicius: Mars Rover Curiosity Raising Turret. NASA, 13 czerwca 2011. [dostęp 2012-09-07]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Alpha Particle X-Ray Spectrometer (APXS) [on-line]. NASA, listopad 2011. s. 13. [dostęp 2012-09-13]. (ang.).
- ↑ CHIMRA: Scoops, Sieves and Delivers Samples. NASA, 2012-10-04. [dostęp 2012-11-27]. (ang.).
- ↑ Sand Filtered through Curiosity’s Sieve. NASA, 2012-08-27. [dostęp 2012-11-29]. (ang.).
- ↑ Too Big for the Sieve. NASA, 2012-10-11. [dostęp 2012-11-30].
- ↑ a b c d Sampling System. NASA. [dostęp 2012-12-02]. [zarchiwizowane z tego adresu (2011-09-16)]. (ang.).
- ↑ Sampling System. [w:] Dust Removal Tool [on-line]. NASA. [dostęp 2012-12-18]. [zarchiwizowane z tego adresu (2011-09-16)].
- ↑ First Use of Mars Rover Curiosity’s Dust Removal Tool. NASA, 2013-01-08. [dostęp 2013-01-08]. (ang.).
- ↑ Mars Science Laboratory Launch. [w:] Rover Power [on-line]. NASA, listopad 2011. s. 43. [dostęp 2012-12-19]. (ang.).
- ↑ Multi-Mission Radioisotope Thermoelectric Generator. NASA. [dostęp 2012-12-21]. [zarchiwizowane z tego adresu (2017-04-26)]. (ang.).
- ↑ Kennedy Space Center. [w:] Media Detail [on-line]. NASA, 7/12/2011. [dostęp 2012-12-22]. [zarchiwizowane z tego adresu (2014-08-17)]. (ang.).
- ↑ a b Mars Science Laboratory Launch. [w:] Rover Telecommunication [on-line]. NASA, listopad 2011. s. 43. [dostęp 2012-09-10]. (ang.).
- ↑ Curiosity Speaks and Orbiters Listen. NASA, 2012-08-27. [dostęp 2012-12-27]. (ang.).
- ↑ Sun in the Way Will Affect Mars Missions in April. NASA, 2013-03-20. [dostęp 2013-09-18]. (ang.).
- ↑ NASA: Mars Science Laboratory Launch. NASA. s. 44. [dostęp 2013-05-22]. (ang.).
- ↑ Computer Swap on Curiosity Rover. NASA, 2013-02-28. s. 1. [dostęp 2013-05-26]. (ang.).
- ↑ Sampling System. [w:] Organic Check Material [on-line]. NASA. [dostęp 2012-12-10]. [zarchiwizowane z tego adresu (2011-09-16)]. (ang.).
- ↑ Sealed Organic Check Material on Curiosity. NASA, 10 września 2012. [dostęp 2012-12-10].
- ↑ Sampling System. [w:] Observation Tray [on-line]. NASA. [dostęp 2012-12-13]. [zarchiwizowane z tego adresu (2011-09-16)]. (ang.).
- ↑ Technical Notes on Mars Solar Time as Adopted by the Mars24 Sunclock. NASA, 8/08/2012. [dostęp 2012-12-29]. (ang.).
- ↑ Watchmaker With Time to Lose. NASA, 2004-01-008. [dostęp 2013-01-15].
- ↑ Martin Perez: Full Curiosity Traverse Passes One-Mile Mark. NASA, 5 sierpnia 2013. [dostęp 2013-08-07]. (ang.).
- ↑ PIA16064: Martian Treasure Map. NASA, 2012-08-17. [dostęp 2013-08-08]. (ang.).
- ↑ Luis Espinoza: Scarp Retreat Model and Exposure History of ‘Yellowknife Bay’. NASA, 2013-12-09. [dostęp 2014-07-28]. (ang.).
- ↑ Luis Espinoza: View of Yellowknife Bay Formation, with Drilling Sites. NASA, 2014-12-09. [dostęp 2014-07-29]. (ang.).
- ↑ Luis Espinoza: Erosion by Scarp Retreat in Gale Crater. NASA, 2014-12-09. [dostęp 2014-07-29]. (ang.).
- ↑ PIA17355: Curiosity’s Progress on Route from ‘Glenelg’ to Mount Sharp. NASA, 2013-08-27. [dostęp 2013-08-31]. (ang.).
- ↑ NASA Rover Inspects Pebbly Rocks at Martian Waypoint. NASA, 2013-09-23. [dostęp 2013-09-25]. (ang.).
- ↑ PIA17765: Traverse Map for Mars Rover Curiosity as of Jan. 26, 2014. Jet Propulsion Laboratory, 2014-01-29. [dostęp 2014-03-14]. (ang.).
- ↑ Curiosity’s Traverse Map Through Sol 546. Mars Science Laboratory Curiosity Rover, 2014-18-02. [dostęp 2014-03-14]. (ang.).
- ↑ PIA17766: Curiosity Mars Rover Approaches 'Dingo Gap,' Mastcam View. Jet Propulsion Laboratory, 2014-01-29. [dostęp 2014-03-14]. (ang.).
- ↑ PIA17930: Curiosity’s View Past Dune at ‘Dingo Gap’. Jet Propulsion Laboratory, 2014-01-31. [dostęp 2014-03-14]. (ang.).
- ↑ PIA17938: Movie of Curiosity’s View Backwards While Crossing Dune. Jet Propulsion Laboratory, 2014-02-11. [dostęp 2014-03-14]. (ang.).
- ↑ PIA17944: Curiosity’s Color View of Martian Dune After Crossing It. Jet Propulsion Laboratory, 2014-02-19. [dostęp 2014-03-14]. (ang.).
- ↑ PIA17939: Curiosity Making Headway West of ‘Dingo Gap’. Jet Propulsion Laboratory, 2014-02-11. [dostęp 2014-03-15]. (ang.).
- ↑ PIA18075: Map of Curiosity Mars Rover’s Drives to ‘the Kimberley’ Waypoint. Jet Propulsion Laboratory, 2014-04-03. [dostęp 2014-04-06]. (ang.).
- ↑ PIA17946: Map of Recent and Planned Driving by Curiosity as of Feb. 18, 2014. Jet Propulsion Laboratory, 2014-02-19. [dostęp 2014-04-06]. (ang.).
- ↑ NASA Mars Rover Curiosity Scoping Out Next Study Area. NASA, 3 kwietnia 2014. [dostęp 2014-04-06]. (ang.).
- ↑ NASA Mars Orbiter Spies Rover Near Martian Butte. NASA, 2014-04-16. [dostęp 2014-04-17]. (ang.).
- ↑ Sandstone Target ‘Windjana’ May Be Next Martian Drilling Site. NASA, 2014-04-26. [dostęp 2014-04-27]. (ang.).
- ↑ Target on Mars Looks Good for NASA Rover Drilling [online], NASA, 29 kwietnia 2014 [dostęp 2014-04-30] (ang.).
- ↑ Tony Greicius: Preparatory Drilling Test on Martian Target ‘Windjana’. NASA, 2014-04-30. [dostęp 2014-05-05].
- ↑ NASA Mars Rover Curiosity Wrapping Up Waypoint Work. NASA, 2014-05-15. [dostęp 2014-05-19]. (ang.).
- ↑ Tony Greicius: Curiosity Finds Iron Meteorite on Mars. NASA, 15 lipca 2014. [dostęp 2014-07-16]. (ang.).
- ↑ Tony Greicius: Martian Rock and Dust Filling Studied with Laser and Camera. NASA, 25 czerwca 2014. [dostęp 2014-07-10]. (ang.).
- ↑ Tony Greicius, Curiosity’s Progress on Route to Mount Sharp [online], NASA, 23 czerwca 2014 [dostęp 2014-07-01] (ang.).
- ↑ Sandy Martian Valleys in Curiosity’s Near Future. Jet Propulsion Laboratory, a division of the California Institute of Technology, 2014-08-01. [dostęp 2014-08-28].
- ↑ Down Northeastern Ramp into ‘Hidden Valley’ on Mars. NASA, 2014-08-12. [dostęp 2014-08-28]. (ang.).
- ↑ Curiosity Tracks in ‘Hidden Valley’ on Mars. NASA, 2014-08-05. [dostęp 2014-08-28]. (ang.).
- ↑ Curiosity’s Brushwork on Martian ‘Bonanza King’ Target. NASA, 2014-08-18. [dostęp 2014-08-29]. (ang.).
- ↑ Candidate Drilling Target on Mars Doesn’t Pass Exam. NASA, 2014-08-22. [dostęp 2014-08-29]. (ang.).
- ↑ Tony Greicius: Looking Up the Ramp Holding ‘Bonanza King’ on Mars. NASA, 2014-08-15. [dostęp 2014-08-25]. (ang.).
- ↑ Tony Greicius: Candidate Drilling Target on Mars Doesn’t Pass Exam. NASA, 2014-08-22. [dostęp 2014-08-27]. (ang.).
- ↑ Tony Greicius: NASA Rover Drill Pulls First Taste From Mars Mountain. NASA. [dostęp 2014-09-25]. (ang.).
- ↑ Kimberly Orr: Geological Transition. NASA, 2014-09-11. [dostęp 2014-09-29]. (ang.).
- ↑ Tony Greicius: NASA’s Curiosity Mars Rover Finds Mineral Match. NASA, 2014-11-04. [dostęp 2014-11-05]. (ang.).
- ↑ Guy Webster: NASA’s Curiosity Rover Making Tracks and Observations. NASA. (ang.).
Bibliografia[edytuj | edytuj kod]
- Mars Science Laboratory. NASA, Jet Propulsion Laboratory California Institute of Technology. [dostęp 2012-08-10]. (ang.).
- Kosmos – Tajemnice Wszechświata nr 53, s. 14–19.
- Weronika Śliwa, „Wiedza i Życie” wrzesień nr 9(933) – Sygnały, s. 10–11.
Linki zewnętrzne[edytuj | edytuj kod]
- Strona z animacjami demonstrującymi rolę drążka różnicowego w łaziku Curiosity (ang.)
- Jak mierzymy czas na Marsie
- Autoportretowa panorama łazika Ciekawość w serwisie APOD: Astronomiczne zdjęcie dnia
- Przecinając Marsa w serwisie APOD: Astronomiczne zdjęcie dnia
- Panoramy sferyczne Curiosity na marsie