
Funkcje trygonometryczne





Funkcje trygonometryczne – funkcje matematyczne wyrażające między innymi stosunki długości boków trójkąta prostokątnego zależnie od miary jego kątów wewnętrznych. Funkcje te wywodzą się z geometrii, konkretniej planimetrii, ale są rozważane także w oderwaniu od niej, dla różnych argumentów rzeczywistych i zespolonych[1]. To uogólnienie funkcji trygonometrycznych umożliwiła analiza matematyczna, w której opisano je szeregami potęgowymi[1]. Powstały też inne definicje, oparte np. na równaniach różniczkowych, innych równaniach funkcyjnych, iloczynach nieskończonych oraz ułamkach łańcuchowych, podane w dalszych sekcjach.
Do funkcji trygonometrycznych zalicza się przede wszystkim sinus, kosinus[a] i tangens, a także kotangens, sekans, kosekans[a][1] i kilka innych, wspominanych rzadziej. Funkcje trygonometryczne to główny przedmiot badań trygonometrii; jej dział poświęcony tym funkcjom nazywano goniometrią[2], przy czym termin ten ma też inne znaczenia. Badania te rozpoczęto w starożytności, a konkretniej starożytnej Grecji, po czym rozwijali ją uczeni indyjscy, islamscy[1] i ze średniowiecznej Europy[3]. W czasach nowożytnych podano dla tych funkcji:
- rozwinięcia w szeregi potęgowe,
- uogólnienia na argumenty zespolone,
- związki z funkcją wykładniczą takie jak wzór Eulera[1],
- rozwinięcia w iloczyny nieskończone.
Pierwotnie matematycy uważali wartości trygonometryczne za linie ciągłe połączone okręgami, jednak w XVIII wieku Leonhard Euler wprowadził współczesne pojęcie funkcji trygonometrycznych[4]. Na przestrzeni stuleci podano dziesiątki tożsamości trygonometrycznych, które m.in. wiążą te funkcje ze sobą.
Funkcje trygonometryczne zalicza się do elementarnych i stosuje w różnych działach matematyki jak geometria, analiza i teoria liczb. Korzystają z nich nauki ścisłe – zarówno przyrodnicze, społeczne, jak i techniczne. Jednym z powodów jest to, że funkcjami sinus i kosinus można modelować zjawiska okresowe jak drgania mechaniczne[1].
Definicje[edytuj | edytuj kod]
Istnieje kilka definicji funkcji trygonometrycznych, bazujących zarówno na pojęciach geometrycznych, jak i analitycznych.
Przez trójkąt prostokątny[edytuj | edytuj kod]

Funkcje trygonometryczne danego kąta ostrego w trójkącie prostokątnym definiuje się jako stosunek długości odpowiednich dwóch boków tego trójkąta:
| funkcja | polskie
oznaczenie[b] |
definicje[5] | |
|---|---|---|---|
| przez boki – stosunek długości | przez inne funnkcje | ||
| sinus | przyprostokątnej leżącej naprzeciw kąta i przeciwprostokątnej [6] | ||
| kosinus[a] | przyprostokątnej przyległej do kąta i przeciwprostokątnej [7] | ||
| tangens | przyprostokątnej leżącej naprzeciw kąta i przyprostokątnej przyległej do tego kąta[8] | ||
| kotangens[a] | przyprostokątnej przyległej do kąta i przyprostokątnej leżącej naprzeciw tego kąta[9] | ||
| sekans[a] | przeciwprostokątnej i przyprostokątnej przyległej do kąta [10] | odwrotność kosinusa [c] | |
| kosekans[a] | przeciwprostokątnej i przyprostokątnej leżącej naprzeciw kąta [11] | odwrotność sinusa [d] | |













Powyższe definicje można zebrać w postaci tabelki[12]:













Do tej listy włączano też kilka innych funkcji; haversin upraszcza obliczanie odległości punktów na powierzchni Ziemi[13][14][15]:
| funkcja | symbol i definicja |
|---|---|
| sinus versus[16][17] | |
| haversin | |
| cosinus versus[19] | |
| exsecans[20] |




Przez okrąg jednostkowy i etymologia nazw[edytuj | edytuj kod]

Jeżeli wokół wierzchołka kąta poprowadzony zostanie okrąg o promieniu 1, czyli tzw. okrąg jednostkowy, to funkcje trygonometryczne miary kąta ostrego wyrażać się będą przez długości odpowiednich odcinków[21]:


Alternatywnie, jako argument funkcji trygonometrycznych zamiast długości łuku można przyjąć pole wycinka – ich wartości dla promienia 1 są równe. Definicja na okręgu jednostkowym ma swój odpowiednik dla funkcji hiperbolicznych, gdzie argument funkcji definiowany jest jako pole wycinka hiperboli, analogicznego do [22].


Definicja ta była historycznie pierwsza. Wynikają z niej nazwy funkcji trygonometrycznych. Pierwotnie tymi nazwami określano właśnie długości odpowiednich odcinków, niekoniecznie na okręgu jednostkowym.
- Sinus, czyli połowa długości cięciwy był w pracach hinduskiego matematyka Aryabhaty w sanskrycie nazywany ardha-jiva („połowa cięciwy”), co zostało skrócone do jiva, a następnie transliterowane do arabskiego jiba (جب). Europejscy tłumacze, Robert z Chester i Gerardo z Cremony w XII-wiecznym Toledo pomylili jiba z jaib (جب), oznaczającym „zatokę” prawdopodobnie dlatego, że jiba (جب) i jaib (جب) są tak samo pisane po arabsku (informacja o samogłoskach jest gubiona w piśmie). Sinus znaczy po łacinie właśnie zatoka[23].
- Tangens pochodzi od łacińskiego tangere – dotykający, styczny, gdyż odcinek jest styczny do okręgu.
- Secans pochodzi z łacińskiego secare – dzielić, rozcinać, rozstrzygać i znaczy odcięcie. Pierwotnie nazwa odnosiła się do odcinka odcinanego przez styczną (tangens).
- Cosinus, cotangens i cosecans powstały przez złożenie łacińskiego co- (wspólnik, towarzysz) i słów sinus, tangens i secans. Pierwotnie cosinus był nazywany complementi sinus, czyli sinus kąta dopełniającego. Rzeczywiście jest on równy sinusowi miary kąta dopełniającego Podobnie cotangens i cosecans są równe tangensowi i secansowi tego kąta. Przedrostek „ko-” był jednak używany w stosunku do cosinusa już w sanskrycie u Aryabhaty (koti-jya, kojya); trudno określić, w jakim stopniu nazwa łacińska do tego nawiązuje[24].




Przez szereg Taylora[edytuj | edytuj kod]

Definicje za pomocą szeregów Taylora określają wartości funkcji trygonometrycznych dla dowolnych liczb rzeczywistych, dla których da się je zdefiniować, pozwalają też na uogólnienie tych funkcji na zbiór liczb zespolonych, kwaternionów, macierzy, a nawet na algebry operatorów, przestrzenie unormowane czy pierścienie nilpotentne[25]. Definicje te są stosowane do numerycznego obliczania wartości funkcji trygonometrycznych.
Zachodzą równości[26][27][28]:

gdzie to liczby Bernoulliego,


gdzie to liczby Eulera,


Każdą z funkcji trygonometrycznych, na dowolnym przedziale zawierającym się w jej dziedzinie, można z dowolną dokładnością jednostajnie przybliżać wielomianami. W otoczeniu zera mogą do tego służyć początkowe wyrazy szeregu Taylora. Nie jest jednak możliwe jednostajne przybliżenie wielomianami funkcji trygonometrycznych w całej ich dziedzinie, jeśli dziedzina przybliżanej funkcji nie jest zbiorem liczb rzeczywistych

Przez równania funkcyjne[edytuj | edytuj kod]
Twierdzenie: Istnieje dokładnie jedna para funkcji rzeczywistych taka, że dla każdego


![{\displaystyle {\begin{cases}s(x)^{2}+c(x)^{2}=1\\[2pt]s(x+y)=s(x)c(y)+c(x)s(y)\\[2pt]c(x+y)=c(x)c(y)-s(x)s(y)\\[2pt]0<xc(x)<s(x)<x\ \mathrm {dla} \ 0<x<1\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e85d1245c98ed55a8af5aece10466d972a95d41)
Tymi funkcjami są[29]:

Funkcje trygonometryczne sinus i cosinus można zdefiniować[30] również jako jedyne funkcje oraz spełniające poniższe trzy warunki:


![{\displaystyle {\begin{cases}s(x_{1}-x_{2})=s(x_{1})c(x_{2})-c(x_{1})s(x_{2})\\[2pt]c(x_{1}-x_{2})=c(x_{1})c(x_{2})+s(x_{1})s(x_{2})\\[2pt]\lim _{x\to 0}{\tfrac {s(x)}{x}}=1\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dfe1a18ead25b6a5bf2a28c6f32b6ac92201acc2)
Przez równania różniczkowe[edytuj | edytuj kod]
Sinus i cosinus są rozwiązaniami szczególnymi równania różniczkowego

które opisuje m.in. ruch masy podwieszonej na sprężynie (tzw. oscylator harmoniczny, patrz Harmoniki).
Sinus jest jedynym rozwiązaniem tego równania spełniającym warunki[31]:
![{\displaystyle {\begin{cases}y(0)=0\\[2pt]y\,'(0)=1\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/16813921748f6ec71b28a7f12ab8838419af6945)
Cosinus natomiast jest jedynym rozwiązaniem, dla którego[31]
![{\displaystyle {\begin{cases}y(0)=1\\[2pt]y\,'(0)=0\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1bef0fe0345ca1ff81f60cd36d710acf4f111726)
Przez iloczyny nieskończone[edytuj | edytuj kod]
Funkcje trygonometryczne można też wprowadzić za pomocą iloczynów nieskończonych[32]:


Przez ułamki łańcuchowe[edytuj | edytuj kod]
Niektóre funkcje trygonometryczne można wyrazić w postaci ułamków łańcuchowych[33][34][35]:



Przez ogólniejsze funkcje[edytuj | edytuj kod]
Funkcje trygonometryczne można też zdefiniować analitycznie jako szczególne przypadki funkcji Bessela, funkcji Mathieu albo funkcji eliptycznych Jacobiego[36].
Własności w dziedzinie rzeczywistej[edytuj | edytuj kod]
Przebieg zmienności funkcji[edytuj | edytuj kod]
W matematyce na poziomie szkół średnich i w wielu praktycznych zastosowaniach rozpatruje się funkcje trygonometryczne dla argumentu będącego liczbą rzeczywistą. Mają one wówczas następujące własności:
- Funkcje sinus i cosinus określone są dla każdej liczby rzeczywistej.
- Tangens jest określony w zbiorze powstałym ze zbioru wszystkich liczb rzeczywistych przez usunięcie liczb mających postać gdzie jest liczbą całkowitą.
- Cotangens jest określony w zbiorze wszystkich liczb rzeczywistych poza liczbami postaci gdzie jest liczbą całkowitą.
- Tangens i secans mają asymptoty pionowe w punktach postaci a cotangens i cosecans w punktach postaci Żadna z tych funkcji nie ma asymptot innego rodzaju.





- Sinus i cosinus są ograniczone: przyjmują wartości z przedziału Tangens i cotangens przyjmują dowolne wartości rzeczywiste, a secans i cosecans wartości ze zbioru[37]
![{\displaystyle [-1,1].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ca7e11ebbb9225cdba1609c129e46d0ec5101a0)
![{\displaystyle (-\infty ,-1]\cup [1,\infty ).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/666b957cb609454fa3f17cada4894f1ef12b3969)
- Maksymalną wartość, dla obu funkcji sinus przyjmuje w punktach a cosinus w punktach gdzie jest liczbą całkowitą.
- Minimalną wartość, dla obu funkcji sinus przyjmuje w punktach a cosinus w punktach gdzie jest liczbą całkowitą.






- Miejscami zerowymi sinusa i tangensa są punkty postaci gdzie jest liczbą całkowitą.
- Miejscami zerowymi cosinusa i cotangensa są punkty postaci gdzie jest liczbą całkowitą.

- Funkcje sinus, tangens, cotangens, cosecans są nieparzyste, a funkcje cosinus i secans parzyste:

- Funkcje trygonometryczne są funkcjami okresowymi. Okresem podstawowym sinusa, cosinusa, secansa i cosecansa jest liczba a tangensa i cotangensa [38][39]:



- gdzie jest liczbą całkowitą.
- Ciągłość i różniczkowalność
- Funkcje sinus i cosinus są ciągłe i różniczkowalne w każdym punkcie prostej rzeczywistej. Tangens, cotangens, secans i cosecans także są ciągłe i różniczkowalne w swoich dziedzinach (zob. wyżej).
- Żadna z nich nie jest różnowartościową, a zatem nie istnieją funkcje odwrotne do funkcji trygonometrycznych w całej dziedzinie. W pewnych przedziałach funkcje te są jednak różnowartościowe i można tam określić funkcje do nich odwrotne.
- Własności algebraiczne
- Funkcje trygonometryczne zalicza się do funkcji elementarnych. Nie są one jednak funkcjami algebraicznymi.
- Liczby oraz są liczbami algebraicznymi dla dowolnych liczb postaci gdzie jest liczbą wymierną[40].




Wykresy[edytuj | edytuj kod]
Cosinusoida jest sinusoidą przesuniętą o wektor Szare linie pionowe na dolnych wykresach to asymptoty. Wykresy można powiększyć przez kliknięcie myszką.
![{\displaystyle \left[-{\tfrac {\pi }{2}},0\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/26e6eb16ecf7414a529554659430cdb443edb84d)
-
 Sinusoida: wykres funkcji
Sinusoida: wykres funkcji -
 Cosinusoida: wykres funkcji
Cosinusoida: wykres funkcji


-
 Tangensoida: wykres funkcji
Tangensoida: wykres funkcji -
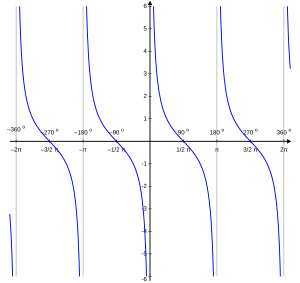 Cotangensoida: wykres funkcji
Cotangensoida: wykres funkcji


-
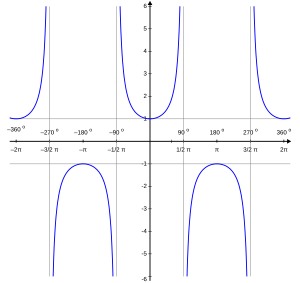 Wykres funkcji secans
Wykres funkcji secans -
 Wykres funkcji cosecans
Wykres funkcji cosecans




Wartości dla typowych kątów[edytuj | edytuj kod]
Wartości funkcji trygonometrycznych dla kątów 0°, 15°, 30°, 45°, 60°, 75°, 90°, 180°[41]:
| radiany | ||||||||
|---|---|---|---|---|---|---|---|---|
| stopnie | ||||||||
| nieokreślony | ||||||||
| nieokreślony | nieokreślony | |||||||
| nieokreślony | ||||||||
| nieokreślony | nieokreślony |






























Wartości wszystkich funkcji trygonometrycznych dla argumentów postaci dają się zapisać za pomocą skończonego wzoru z użyciem podstawowych działań arytmetycznych i pierwiastka kwadratowego wtedy i tylko wtedy, gdy po skróceniu ułamka liczba jest iloczynem potęgi dwójki i różnych liczb pierwszych Fermata (jak dotąd znanych jest pięć takich liczb: 3, 5, 17, 257, 65537)[42][43]. W szczególności nie da się zapisać w ten sposób dokładnej wartości funkcji kąta 1°, gdyż a ma drugą potęgę przy trójce. Warunek na jest identyczny jak warunek konstruowalności -kąta foremnego za pomocą cyrkla i linijki (por. twierdzenie Gaussa-Wantzela).





Wzory redukcyjne[edytuj | edytuj kod]
Wzory redukcyjne pozwalają sprowadzić dowolny rzeczywisty argument funkcji trygonometrycznej do argumentu z przedziału czyli [44]:


| I ćwiartka | II ćwiartka | III ćwiartka | IV ćwiartka | ||||
|---|---|---|---|---|---|---|---|



























Aby zapamiętać zmianę funkcji, można wspomagać się następującą obserwacją: funkcja przechodzi w swoją kofunkcję, jeżeli rozpatrywany kąt ma postać bądź w przypadkach oraz funkcja nie ulega zmianie. Znaki w poszczególnych ćwiartkach układu dla odpowiednich funkcji w powyższej tabelce zgodne są ze znakami redukowanych funkcji w danej ćwiartce według tabeli[37]:





| I ćwiartka | II ćwiartka | III ćwiartka | IV ćwiartka | |
|---|---|---|---|---|
| + | + | – | – | |
| + | – | – | + | |
| + | – | + | – | |
| + | – | + | – | |
| + | – | – | + | |
| + | + | – | – |
Metodą mnemotechniczną zapamiętania znaków dla stosowanych najczęściej w redukcji pierwszych czterech spośród powyższych funkcji jest popularny wierszyk nieznanego autora:
- W pierwszej ćwiartce są dodatnie,
- w drugiej tylko sinus,
- w trzeciej tangens i cotangens,
- a w czwartej cosinus.
W innych wersjach pierwszy wers brzmi:
- W pierwszej ćwiartce same plusy lub W pierwszej wszystkie są dodatnie.
Podstawowe tożsamości trygonometryczne[edytuj | edytuj kod]
Związki między funkcjami trygonometrycznymi spełnione dla dowolnego argumentu ich dziedziny to tzw. tożsamości trygonometryczne. Są one prawdziwe zarówno w dziedzinie rzeczywistej, jak i zespolonej. Często używane są:

- definicja tangensa i cotangensa za pomocą sinusa i cosinusa (pozwala wyprowadzić tożsamości dla tangensa i cotangensa z tożsamości dla sinusa i cosinusa)[45]:



- wzory na sinus i cosinus sumy i różnicy kątów[45]:


- wzory na sumę i różnicę sinusów i cosinusów[45]:



- wzory na sinus i cosinus podwojonego argumentu[46]:


- wzory na sinus i cosinus połowy argumentu[47]:


- iloczyn w postaci sumy[47]:










(Zastrzeżenie formalne: Równości powyżej są prawdziwe tylko dla argumentów, dla których wszystkie użyte funkcje są określone, a w mianownikach nie występują zera)
Pochodne funkcji trygonometrycznych[edytuj | edytuj kod]
Zachodzą równości[49]:






Można z nich otrzymać pochodne wyższych rzędów:
![{\displaystyle \sin ^{(n)}x=\sin \left({\tfrac {n\pi }{2}}+x\right)={\begin{cases}\sin x&n=4k\\[2pt]\cos x&n=4k+1\\[2pt]-\sin x&n=4k+2\\[2pt]-\cos x&n=4k+3\end{cases}}{\mbox{ dla }}k\in \{0,1,2,\dots \},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d45cc15a9d884d19503950b2d0c2df396219b258)
![{\displaystyle \cos ^{(n)}x=\cos \left({\tfrac {n\pi }{2}}+x\right)={\begin{cases}\cos x&n=4k\\[2pt]-\sin x&n=4k+1\\[2pt]-\cos x&n=4k+2\\[2pt]\sin x&n=4k+3\end{cases}}{\mbox{ dla }}k\in \{0,1,2,\dots \}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3b16bbd1cbd3daec6710e521bd90e45e04953868)
Wzory na -te pochodne pozostałych funkcji trygonometrycznych również istnieją, jednak są o wiele bardziej skomplikowane[50][51][52][53].

Całki funkcji trygonometrycznych[edytuj | edytuj kod]
Podstawowe całki to[54]:






gdzie

Każda całka funkcji wymiernej postaci jest elementarna, można ją obliczyć przez podstawienie[55]:


wówczas:







Własności w dziedzinie zespolonej[edytuj | edytuj kod]
Używając definicji analitycznych funkcji trygonometrycznych można te funkcje uogólnić m.in. na liczby zespolone.
Porównanie z funkcjami zmiennej rzeczywistej[edytuj | edytuj kod]
Uogólnione w ten sposób funkcje trygonometryczne zachowują większość własności zmiennej rzeczywistej:
- okresowość (w tym okres podstawowy),
- tożsamości trygonometryczne,
- miejsca zerowe,
- punkty nieokreśloności:
- sinus i cosinus są określone w całym zbiorze liczb zespolonych,
- tangens jest określony w zbiorze liczb zespolonych, których usunięto liczby postaci a cotangens – punktów postaci gdzie jest całkowita.

Zasadniczą różnicą jest brak ograniczoności funkcji sinus i cosinus. Przykładowo cosinus niezerowego argumentu urojonego jest zawsze liczbą rzeczywistą większą od w szczególności:

Funkcje trygonometryczne zmiennej zespolonej są (nieskończenie) wielokrotne na całej płaszczyźnie zespolonej.
Części rzeczywiste, urojone, moduły i argumenty[edytuj | edytuj kod]
Funkcja Część rzeczywista Część urojona Moduł
















Argument oblicza się według wzorów:



gdzie to wartość odpowiedniej funkcji trygonometrycznej.

Wzór Eulera[edytuj | edytuj kod]
W dziedzinie zespolonej zachodzi związek, zwany wzorem Eulera:

Wynika z niego, iż:






gdzie:
- jest stałą, zwaną podstawą logarytmu naturalnego,
- jest jednostką urojoną



Wzory te pozwalają na niemal mechaniczne upraszczanie wyrażeń trygonometrycznych.
Wykresy[edytuj | edytuj kod]
Liczby zespolone na płaszczyźnie zespolonej zostały oznaczone kolorami, zgodnie z umownym schematem. Odcienie barw określają argument, a jasność – moduł wyniku
-
 Funkcja sinus
Funkcja sinus -
 Funkcja cosinus
Funkcja cosinus -
 Funkcja tangens
Funkcja tangens -
 Funkcja cotangens
Funkcja cotangens -
 Funkcja secans
Funkcja secans -
 Funkcja cosecans
Funkcja cosecans -
 Kod kolorów
Kod kolorów







Zastosowania matematyczne[edytuj | edytuj kod]
Ze względu na obecność funkcji trygonometrycznych w najróżniejszych działach nauki i techniki nie jest możliwe podanie wszystkich ich zastosowań[56]. Poniżej wymieniono więc tylko niektóre.
Geometria[edytuj | edytuj kod]
Bezpośrednim zastosowaniem funkcji trygonometrycznych w geometrii elementarnej jest wyznaczanie długości boków lub kątów trójkąta. Poniżej podano kilka innych zastosowań.
Twierdzenia sinusów, cosinusów i tangensów[edytuj | edytuj kod]


W każdym trójkącie (przy oznaczeniach standardowych, zob. rysunek) zachodzą następujące równości:
Twierdzenie sinusów, inaczej twierdzenie Snelliusa[57]:

( jest promieniem okręgu opisanego)

Twierdzenie cosinusów, inaczej twierdzenie Carnota[58]:

Twierdzenie tangensów, inaczej twierdzenie Regiomontana[58]:

W geometrii sferycznej istnieje także twierdzenie haversinów, związane z nieużywaną dziś funkcją trygonometryczną pozwalające na obliczanie odległości pomiędzy dwoma punktami na sferze[13].

Wzory na pole trójkąta[edytuj | edytuj kod]
Wzory na pole trójkąta często wykorzystują funkcje trygonometryczne[56]:

lub

lub

gdzie:
- to boki trójkąta,
- to miary kątów o wierzchołkach leżących naprzeciw boków odpowiednio i
- to promień koła opisanego.




Iloczyny wektorów[edytuj | edytuj kod]
W geometrii i algebrze liniowej definiowane są iloczyny wektorów, m.in. iloczyny skalarny i wektorowy. Czasem konieczne jest obliczenie wartości iloczynu skalarnego lub wektorowego dla wektorów o znanych kierunkach, zwrotach i długościach. Wzory wykorzystują funkcje trygonometryczne kąta między wektorami:


- gdzie jest ustalonym wektorem jednostkowym prostopadłym tak do jak i do



Współrzędne biegunowe, sferyczne i walcowe[edytuj | edytuj kod]
Najczęściej w geometrii stosowany jest układ współrzędnych kartezjańskich. Niekiedy jednak wygodnie jest stosować inne układy, w których niektóre współrzędne są wyznaczone za pomocą kątów. Do takich układów należy układ współrzędnych biegunowych, układ współrzędnych sferycznych (jego zastosowaniem są np. współrzędne geograficzne) i układ współrzędnych walcowych. Wówczas przydatne są funkcje trygonometryczne, m.in. do przeliczania takich współrzędnych na współrzędne kartezjańskie.
Geometria sferyczna[edytuj | edytuj kod]
Funkcje trygonometryczne są ważnymi narzędziami geometrii sferycznej i jej zastosowań w astronomii, nawigacji i geodezji, gdzie służą m.in. do rozwiązywania trójkątów sferycznych.
Analiza matematyczna[edytuj | edytuj kod]
Szereg Fouriera[edytuj | edytuj kod]

Funkcje tworzą dla dowolnego układ ortonormalny. Dzięki temu funkcje okresowe spełniające warunki Dirichleta mogą być wyrażone w postaci szeregu Fouriera:




Można go również wyrazić za pomocą np. samych funkcji sinus. Poszczególne składowe tego szeregu nazywane są harmonicznymi. Szereg Fouriera odgrywa wielką rolę w fizyce, teorii drgań, a nawet teorii muzyki (zob. szereg harmoniczny (muzyka), alikwoty).
Funkcja Weierstrassa[edytuj | edytuj kod]

Za pomocą szeregu trygonometrycznego definiowana jest funkcja Weierstrassa, która jest ciągła, jednak nie jest w żadnym punkcie różniczkowalna[60]:

gdzie jest pewną liczbą z przedziału natomiast jest liczbą nieparzystą, spełniającą warunek


Funkcja Dirichleta[edytuj | edytuj kod]
Za pomocą funkcji cosinus definiowana jest tzw. funkcja Dirichleta, która przyjmuje wartość 1 dla argumentów wymiernych i 0 dla niewymiernych[61]:

Teoria liczb[edytuj | edytuj kod]
Funkcja Möbiusa może być wyrażona trygonometrycznie[62]:


Zastosowania poza matematyką[edytuj | edytuj kod]
Funkcje trygonometryczne znalazły zastosowania w różnych naukach ścisłych, w tym na pograniczu tych nauk z humanistyką i sztuką.
Nauki przyrodnicze[edytuj | edytuj kod]

- akustyka: np. analiza harmoniczna,
- astronomia, nawigacja, kartografia, oceanografia: trygonometria sferyczna stosowana do powierzchni Ziemi
- astronomia i geodezja: paralaksa pozwala wyznaczać odległości bez przebywania ich, nawet tysięcy lat świetlnych.
- chemia i krystalografia: obliczanie odległości pomiędzy atomami w krysztale,
- fizyka: np. ruch harmoniczny, prawo załamania światła, zob. też sekcję Harmoniki tego artykułu,
- geofizyka, sejsmologia: badanie fal sejsmicznych,
- optyka: prawo załamania światła, polaryzacja fali,
- teoria chaosu[63].
Nauki społeczne[edytuj | edytuj kod]
- ekonomia (w szczególności analiza rynków finansowych), probabilistyka, statystyka, meteorologia: np. analiza harmoniczna szeregów czasowych
- fonetyka, analiza języka naturalnego: analiza harmoniczna głosek
- teoria muzyki: np. alikwoty, szereg harmoniczny.
Nauki techniczne[edytuj | edytuj kod]
- architektura, mechanika: bezpośrednie zastosowanie do elementów trójkąta
- elektryka i elektronika: np. przebiegi sinusoidalne prądu zmiennego
- geodezja, inżynieria lądowa: w szczególności niwelacja trygonometryczna,
- grafika komputerowa: np. symulowanie odbicia i załamania światła w ray tracingu
- kompresja obrazu: np. przy kompresji JPEG
- kryptologia: w związku z zastosowaniami w teorii liczb,
- obrazowanie medyczne: tomografia komputerowa i USG wymagają obliczeń trygonometrycznych
- robotyka: np. algorytm sterowania sinusoidalnego.
Historia[edytuj | edytuj kod]
Polskie nazwy[edytuj | edytuj kod]
Poloniści dopuszczają zarówno formy „cosinus, cotangens, cosecans, secans”, jak i „kosinus, kotangens, kosekans, sekans”. Słowniki języka polskiego skłaniają się ku tym drugim jako bardziej naturalnym dla języka polskiego[64], jednak słowniki i encyklopedie matematyczne raczej nie używają form spolszczonych, podobnie w naukowej literaturze matematycznej są one rzadko spotykane.
Już pod koniec XVIII wieku Jan Śniadecki próbował wprowadzić całkowicie polskie odpowiedniki nazw i skrótów funkcji trygonometrycznych[65][66] (w nawiasie proponowany skrót):
- sinus – wstawa (wst),
- cosinus – dostawa (dost),
- tangens – styczna (sty),
- cotangens – dostyczna (dosty),
- secans – sieczna (sie),
- cosecans – dosieczna (dosie).
Propagowali je potem m.in.:
- Andrzej Radwański w dziele „Słownik wyrazów grecko-łacińskich w poznawaniu Rody używanych… bezpłatnie dodany do dzieła Treść nauki przyrodzenia” wydanym w 1850 roku[67]. Zwalczał tam wszelkie nazwy pochodzące z greki i łaciny;
- prof. Maksymilian Thullie (1853–1939), rektor Szkoły Politechnicznej we Lwowie. W latach 1918–1924 próbował forsować polskie nazwy w swoich pracach, np. w podręczniku Statyka budowli (wyd. IV, Lwów 1921), jednak nie przyjęły się[68].
Oznaczenia[edytuj | edytuj kod]
W różnych językach stosuje się różne skróty funkcji trygonometrycznych. Oznaczenia kosinusa są jednakowe we wszystkich podanych, a sekansa i kosekansa – jednakowe prawie wszędzie, poza językiem francuskim, gdzie nad tymi skrótami zdarza się akcent: séc, coséc[69][70]. Różnice w skrótach pozostałych trzech funkcji przedstawia poniższa tabela:
| język | sinus | tangens | cotangens |
|---|---|---|---|
| angielski[71][72] | sin | tan, tg[73] | cot, ctg[73], ctn[74] |
| chiński[75] | sin | tan, tg[76] | cot, ctg[76] |
| fiński[77] | sin | tan | cot |
| francuski[70] | sin[69] | tan[78], tang[69], tg[79] | cotan[78], cotg[79], cot[69], ctg |
| hiszpański[80][81] | sen | tan, tg[82], tag[83] | cot, cotg[83], ctg[82] |
| niderlandzki[84] | sin | tan | cot |
| indonezyjski[85] | sin | tan | cot |
| japoński[86] | sin | tan | cot |
| koreański[87] | sin | tan | cot |
| litewski[88] | sin | tg | ctg |
| niemiecki[89] | sin | tan, tg[90] | cot, ctg[90] |
| portugalski[91] | sen[92], sin | tan, tg[92][93] | cot, ctg[93] |
| rosyjski[94] | sin | tg | ctg |
| turecki[95] | sin | tan | cot |
| ukraiński[96] | sin | tg | ctg |
| węgierski[97] | sin | tg | ctg |
| włoski[98] | sen[99], sin | tan, tg[99] | cot, ctg[99] |
Związki z innymi funkcjami[edytuj | edytuj kod]
Funkcjami trygonometrycznymi definiuje się inne pojęcia matematyczne, np.:
- inne funkcje elementarne jak harmoniki, funkcje kołowe[100][101] i funkcja sinc;
- niektóre funkcje specjalne jak sinus całkowy i cosinus całkowy, całki Fresnela, funkcje sferyczne i kuliste;
- inne funkcje rzeczywiste jak funkcja Weierstrassa;
- krzywe będące wykresami tych funkcji w dziedzinie rzeczywistej; dla sinusa, kosinusa, tangensa i kotangensa te krzywe to odpowiednio sinusoida[102], kosinusoida[103], tangensoida[104] i kotangensoida[105][39];
- inne krzywe jak sinusoida zagęszczona.
Do funkcji trygonometrycznych nawiązuje też nazewnictwo niektórych innych funkcji:
- elementarnych jak funkcje hiperboliczne, mające analogiczne własności, oraz odwrotne do nich funkcje polowe;
- specjalnych jak całkowy sinus hiperboliczny.
Funkcje odwrotne do trygonometrycznych[edytuj | edytuj kod]
Funkcje odwrotne do trygonometrycznych nazywane są też funkcjami kołowymi lub cyklometrycznymi. Ze względu na okresowość funkcji trygonometrycznych funkcje te są do nich odwrotne jedynie w przedziale obejmującym jeden okres[106].
| Nazwa | Zapis | Odwrotna do | Dziedzina | Przeciwdziedzina |
|---|---|---|---|---|
| arcus sinus | ||||
| arcus cosinus | ||||
| arcus tangens | ||||
| arcus cotangens | ||||
| arcus secans | ||||
| arcus cosecans |


![{\displaystyle [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51e3b7f14a6f70e614728c583409a0b9a8b9de01)
![{\displaystyle [-{\tfrac {\pi }{2}},{\tfrac {\pi }{2}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7c0215b3d39f1ccb8768a392d7ab3e9af48661c0)


![{\displaystyle [0,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e2a912eda6ef1afe46a81b518fe9da64a832751)










![{\displaystyle [0,{\tfrac {\pi }{2}})\cup ({\tfrac {\pi }{2}},\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7db7301c93ff31cd2ca8a1330128f8aac4a627ce)


![{\displaystyle [-{\tfrac {\pi }{2}},0)\cup (0,{\tfrac {\pi }{2}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/401a10956efd9f5941632fdd3b3b4e774031c179)
Harmoniki[edytuj | edytuj kod]

Funkcje postaci

gdzie:
- – amplituda,
- – prędkość kątowa (pulsacja),
- – faza początkowa

są nazywane harmonikami[107]. Funkcje sinus i cosinus są ich szczególnymi przypadkami. Harmoniki mają duże znaczenie w praktyce, przy analizie funkcji okresowych. Kombinacja liniowa kilku harmonik o tej samej częstotliwości jest ciągle harmoniką o tej częstotliwości.
Harmoniki stosowane są w fizyce przy badaniu wszelkich zjawisk okresowych, np. drgań. Wiele z tych zjawisk, np. masa na sprężynie, wahadło przy niewielkim wychyleniu albo elektryczny obwód rezonansowy, w wyidealizowanym przypadku (przy braku strat energii), opisuje równanie różniczkowe:

którego rozwiązaniami są harmoniki.
Funkcje hiperboliczne[edytuj | edytuj kod]

Jak podano w sekcji Definicja za pomocą równań funkcyjnych, funkcje sinus i cosinus można zdefiniować w następujący sposób[30]:

Jeśli warunek W2 zmienić na:

wówczas warunki W1, W2', W3 będą spełnione przez inne funkcje, które przez analogię nazywane są sinusem hiperbolicznym (sinh) i cosinusem hiperbolicznym (cosh)[108].
Analogicznie jak dla funkcji trygonometrycznych definiuje się też tangens, cotangens, secans i cosecans hiperboliczny jako odpowiednie ilorazy z udziałem sinusa i cosinusa hiperbolicznego. Istnieje także całkowy sinus hiperboliczny i całkowy cosinus hiperboliczny.


Także definicja na okręgu jednostkowym dla funkcji trygonometrycznych ma swój odpowiednik hiperboliczny. Zamiast okręgu jednostkowego

należy wziąć hiperbolę o równaniu

Na okręgu jednostkowym argument funkcji trygonometrycznych odpowiadał mierze kąta, jednak jest ona równa polu wycinka kołowego, symetrycznego względem osi OX. Podobnie w przypadku funkcji hiperbolicznych argumentowi odpowiada pole odpowiedniego wycinka. Biorąc długości odcinków, które na okręgu odpowiadały funkcjom sinus, cosinus i tangens, uzyskuje się na hiperboli sinus, cosinus i tangens hiperboliczny[22].
Istnieją też inne analogie. Dla funkcji trygonometrycznych zachodzą równości, podane w sekcji Wzór Eulera.
Analogiczne wzory występują dla funkcji hiperbolicznych[109]:

Istnieją też analogie niektórych tożsamości trygonometrycznych[109]:



Podobieństwa te wynikają z głębokiej symetrii pomiędzy funkcjami trygonometrycznymi a hiperbolicznymi, przejawiającej się także po ich uogólnieniu na argumenty zespolone[109].
Zobacz też[edytuj | edytuj kod]
Uwagi[edytuj | edytuj kod]


Przypisy[edytuj | edytuj kod]
- ↑ a b c d e f g Funkcje trygonometryczne, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ goniometria, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ Regiomontanus, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ Hans Niels Jahnke: A history of analysis. Providence, RI: American Mathematical Society, 2003, s. 115-116. ISBN 0-8218-2623-9. OCLC 51607350.
- ↑ Wybrane wzory matematyczne, Warszawa: Centralna Komisja Egzaminacyjna, 2015, s. 14, ISBN 978-83-940902-1-0.
- ↑ sinus, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ cosinus, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ tangens, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ cotangens, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ secans, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ cosecans, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, (w bibliografii), s. 230.
- ↑ a b D. Zwillinger: (red.) Spherical Geometry and Trigonometry. Boca Raton, FL: CRC Press, 1995, s. 468-471, § 6.4, seria: CRC Standard Mathematical Tables and Formulae.
- ↑ Roger W. Sinnott. Virtues of the Haversine. „Sky and Telescope”. 68 (2), s. 159, 1984. [zarchiwizowane z adresu 2013-12-11]. (ang.).
- ↑ Chris Veness: Calculate distance and bearing between two Latitude/Longitude points using Haversine formula in JavaScript. www.movable-type.co.uk. [dostęp 2013-10-13]. (ang.).
- ↑ Eric W. Weisstein, Versine, [w:] MathWorld, Wolfram Research [dostęp 2009-01-10] (ang.).
- ↑ sinus versus, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ Eric W. Weisstein, Haversine, [w:] MathWorld, Wolfram Research [dostęp 2009-01-10] (ang.).
- ↑ Eric W. Weisstein, Coversine, [w:] MathWorld, Wolfram Research [dostęp 2009-01-10] (ang.).
- ↑ Eric W. Weisstein, Exsecant, [w:] MathWorld, Wolfram Research [dostęp 2009-01-10] (ang.).
- ↑ Reinhardt i Soeder 2006 ↓, (w bibliografii), s. 182–183.
- ↑ a b Bronsztejn i Siemiendiajew 1976 ↓, s. 253.
- ↑ Owen Gingerich, Astronomia islamu, „Urania”, LX (8), sierpień 1989, s. 233, ISSN 0042-0794.
- ↑ David Bressoud, Joy Laine: Parallel Developments in Philosophy and Mathematics in India. s. 13. [dostęp 2024-02-11]. (ang.).
- ↑ W przypadku pierścieni nilpotentnych szereg Taylora ma tylko skończoną liczbę wyrazów różną od 0.
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 417–418.
- ↑ Reinhardt i Soeder 2006 ↓, s. 294.
- ↑ Mathworld – Secans – series representation. [dostęp 2009-01-10].
- ↑ Paweł Głowacki: Analiza B. Wykład 3. Funkcje elementarne. [dostęp 2008-03-19]. twierdzenie 20.
- ↑ a b Reinhardt i Soeder 2006 ↓, s. 295.
- ↑ a b Wolfram Mathworld – The best-known properties and formulas for trigonometric functions. [dostęp 2009-03-19].
- ↑ Stanisław Saks, Antoni Zygmund: Funkcje analityczne. Warszawa-Lwów-Wilno: 1938, s. 299, seria: Monografie Matematyczne tom 10.
- ↑ Eric W. Weisstein, Sine, [w:] MathWorld, Wolfram Research [dostęp 2009-01-02] (ang.).
- ↑ Eric W. Weisstein, Tangent, [w:] MathWorld, Wolfram Research [dostęp 2009-01-02] (ang.).
- ↑ Cotangent: continued fraction representation. Mathworld. [dostęp 2009-01-02]. (ang.).
- ↑ Wolfram Mathworld – Connections within the group of trigonometric functions and with other function groups. [dostęp 2009-03-19].
- ↑ a b Bronsztejn i Siemiendiajew 1976 ↓, s. 231.
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 625.
- ↑ a b Bronsztejn i Siemiendiajew 1976 ↓, s. 114–116.
- ↑ Jörg Jahnel: When is the (co)sine of a rational angle equal to a rational number?. s. 3. [dostęp 2015-12-28]. [zarchiwizowane z tego adresu (2006-10-02)]. (ang.).
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 233.
- ↑ Wolfram Mathworld – Sine: Specific values. [dostęp 2009-03-19].
- ↑ Wolfram Mathworld – Tangent: Specific values. [dostęp 2009-03-19].
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 232.
- ↑ a b c d e Bronsztejn i Siemiendiajew 1976 ↓, s. 234.
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 235.
- ↑ a b Bronsztejn i Siemiendiajew 1976 ↓, s. 236.
- ↑ Słownik encyklopedyczny – matematyka, s. 93–94.
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 397.
- ↑ Tangent differentiation. [dostęp 2009-01-24].
- ↑ Cotangent differentiation. [dostęp 2009-01-24].
- ↑ Secant differentiation. [dostęp 2009-01-24].
- ↑ Cosecant differentiation. [dostęp 2009-01-24].
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 426.
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 438.
- ↑ a b Wolfram Mathworld – Introduction to the trigonometric functions. [dostęp 2009-03-19].
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 239.
- ↑ a b Bronsztejn i Siemiendiajew 1976 ↓, s. 240.
- ↑ a b Bronsztejn i Siemiendiajew 1976 ↓, s. 650.
- ↑ Paul Du Bois-Reymond. Versuch einer Classification der willk¨urlichen Functionen reeller Argumente nach ihren Aenderungen in den kleinsten Intervallen. „J. Reine Angew. Math”. 79, s. 21–37, 1875.
- ↑ Wolfram Mathworld – The Dirichlet function. [dostęp 2009-03-19].
- ↑ Mathworld – MoebiusMu[n – Series representations]. [dostęp 2009-01-10].
- ↑ Mathworld – Logistic equation solution. [dostęp 2009-01-10]. (ang.).
- ↑ Hasło cosinus w słowniku języka polskiego PWN. [dostęp 2008-04-12]. [zarchiwizowane z tego adresu (3 czerwca 2008)].
- ↑ Jan Śniadecki: Trygonometrya kulista analitycznie wyłożona. Wyd. 2. 1820.
- ↑ Maksymilian Tytus Huber: Pisma. Państwowe Wydawnictwo Naukowe, 1957.
- ↑ Mateusz Pasternak: Anegdoty matematyczne. [dostęp 2008-04-12].
- ↑ Roman Ciesielski, Katarzyna Tyńska: Nasza Politechnika: Izydor Stella-Sawicki. [dostęp 2008-04-12].
- ↑ a b c d Jean Baptiste, Joseph Delambre: Histoire de l’astronomie du moyen âge. V. Courcier, 1819, s. 462. [dostęp 2009-03-22]. (fr.).
- ↑ a b Pascal Dupont: Exercices de mathématiques: Volume 1, Algèbre et géométrie. Wyd. 2. De Boeck Université, 2005, s. 98. ISBN 2-8041-4312-0, ISBN 978-2-8041-4312-1. [dostęp 2009-03-22].
- ↑ Max Fogiel: Handbook of mathematical, scientific, and engineering formulas, tables, functions, graphs, transforms. Research and Education Association, 1994, s. 213. ISBN 0-87891-521-4, ISBN 978-0-87891-521-7. [dostęp 2009-03-22]. (ang.).
- ↑ Anthony Nicolaides: Pure Mathematics. Wyd. 3. Pass Publications, 2007, s. 42. ISBN 1-872684-87-4, ISBN 978-1-872684-87-1. [dostęp 2009-03-22]. (ang.).
- ↑ a b Journal of engineering for industry. American Society of Mechanical Engineers, 1969. [dostęp 2009-03-22]. (ang.).
- ↑ Felix Klein: Elementary Mathematics from an Advanced Standpoint: Arithmetic, Algebra, Analysis. Cosimo, Inc., 2007, s. 180. ISBN 1-60206-647-7, ISBN 978-1-60206-647-2. [dostęp 2009-03-22]. (ang.).
- ↑ Zhi-shu He Tian: 數學定理、公式暨習題詳解. 五南圖書出版股份有限公司, 2007, s. 133. ISBN 957-11-4564-5, ISBN 978-957-11-4564-8. [dostęp 2009-03-22]. (chiń.).
- ↑ a b Ke xue shi ji kan. Ke xue chu ban she. [dostęp 2009-03-23]. (chiń.).
- ↑ Weikko Aleksanteri Heiskanen, Seppo Härmälä: Maastomittaus ja kartoitus. W. Söderström, 1972. [dostęp 2009-03-23]. (fiń.).
- ↑ a b Gilles Desbiens: Trigonométrie du triangle rectangle. [dostęp 2009-03-22]. [zarchiwizowane z tego adresu (2008-02-20)]. (fr.).
- ↑ a b André Caillemer, Catherine Le Cocq: Astronomie de position, géodésie. Wyd. 2. Editions TECHNIP, 1998, s. 187. ISBN 2-7108-0439-5, ISBN 978-2-7108-0439-0. [dostęp 2009-03-22]. (fr.).
- ↑ Arenas Solá: Matemáticas: fichas de la asignatura. Edicions Universitat Barcelona, s. 24. ISBN 84-475-3206-2, ISBN 978-84-475-3206-3. [dostęp 2009-03-22]. (hiszp.).
- ↑ James Stewart, Lothar Redlin, Saleem Watson, Héctor Vidaurri, Alejandro Alfaro, María Bruna, Josefina Anzures, Francisco Sánchez Fragoso: Precálculo: Matemáticas para el cálculo. Wyd. 5. Cengage Learning Editores, 2007, s. 411. ISBN 970-686-638-8, ISBN 978-970-686-638-7. [dostęp 2009-03-22]. (hiszp.).
- ↑ a b Lira Contreras, Ana Rosa: Geometria y Trigonometria. Ediciones Umbral, s. 117. ISBN 970-9758-34-9, ISBN 978-970-9758-34-4. [dostęp 2009-03-22]. (hiszp.).
- ↑ a b Salvador Guillén Vázquez: Manual de matemáticas para acceso a la Universidad. Editorial Ramón Areces, 1991, s. 1704. ISBN 84-8004-006-8, ISBN 978-84-8004-006-8. [dostęp 2009-03-22]. (hiszp.).
- ↑ Jean-Pierre Daems, Edward Jennekens, Valentijn Van Hooteghem: Argument 4-5 – Goniometrie – Driehoeksmeting. Uitgeverij De Boeck, 2004, s. 211. ISBN 90-455-0674-2, ISBN 978-90-455-0674-6. [dostęp 2009-03-23].
- ↑ Sulistiyono, Sri Kurnianingsih, Kuntarti: Matematika Sma Dan Ma untuk Kelas XI Semester 1. Jakarta: ESIS, s. 172. ISBN 979-734-502-5, ISBN 978-979-734-502-0. ISBN 979-734-502-5. [dostęp 2009-03-22]. (indonez.).
- ↑ 信州大学. 工学部: 信州大学工学部紀要. 信州大学工学部, 1981. [dostęp 2009-03-22]. (jap.).
- ↑ Yong-un Kim: Tongyang ŭi kwahak kwa sasang: Hanʼguk kwahak ŭi kanŭngsŏng ŭl chʻajasŏ. Ilchisa, 1984. [dostęp 2009-03-23]. (kor.).
- ↑ Litovskiĭ fizicheskiĭ sbornik. Gos. izd-vo polit. i nauch. lit-ry, 1984. [dostęp 2009-03-23]. (lit.).
- ↑ Johann Mutschmann, Fritz Stimmelmayr, Werner Knaus: Taschenbuch der Wasserversorgung. Vieweg+Teubner Verlag, 2007, s. 873. ISBN 3-8348-0012-0, ISBN 978-3-8348-0012-1. [dostęp 2009-03-22]. (niem.).
- ↑ a b Hans Geiger, Karl Scheel: Handbuch der Physik. Julius Springer, 1928. [dostęp 2009-03-22]. (niem.).
- ↑ Dubbel Manual Da Construcao de Maquinas. Hemus, s. 68. ISBN 85-289-0270-6, ISBN 978-85-289-0270-9. [dostęp 2009-03-22]. (port.).
- ↑ a b Memórias da Academia das ciências de Lisboa, classe de ciências. Lisbona: 1967. [dostęp 2009-03-22]. (port.).
- ↑ a b Antônio Gonçalves, Moreira Couto: Geometria descritiva e insolação. 1961. [dostęp 2009-03-22]. (port.).
- ↑ Тесты и экзаменационные задания по математике за курс средней школы (ЕГЭ): Учебное пособие. Издательский дом „Питер”, s. 160. ISBN 5-469-00278-0, ISBN 978-5-469-00278-9. [dostęp 2009-03-22]. (ros.).
- ↑ Orta Doğu: Isi transferí. [dostęp 2009-03-23]. (tur.).
- ↑ Mykola Platonovych Bahan: Ukraïnsʹka radi͡a͡nsʹka entsyklopedii͡a͡. Akademii͡a nauk Ukr. Radi͡ansʹkoï Sot͡sialistichnoï Respubliky, 1959. [dostęp 2009-03-22]. (ukr.).
- ↑ A Magyar Tudományos Akadémia Matematikai és Fizikai Tudományok Ostályának kózleményei. 1974. [dostęp 2009-03-22]. (węg.).
- ↑ James Stewart: Calcolo. Funzioni di una variabile. Apogeo Editore, 2001, s. 222. ISBN 88-7303-747-X, ISBN 978-88-7303-747-7. [dostęp 2009-03-22]. (wł.).
- ↑ a b c Pierangelo Andreini: Manuale dell’ingegnere meccanico. Wyd. 2. Hoepli Editore, 2002, s. 16. ISBN 88-203-3380-5, ISBN 978-88-203-3380-5. [dostęp 2009-03-22]. (wł.).
- ↑ Funkcje elementarne, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ Funkcje cyklometryczne, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ sinusoida, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ cosinusoida, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ tangensoida, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ cotangensoida, [w:] Encyklopedia PWN [dostęp 2023-12-12].
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 117.
- ↑ Bronsztejn i Siemiendiajew 1976 ↓, s. 237.
- ↑ Reinhardt i Soeder 2006 ↓, s. 297.
- ↑ a b c Bogdan Miś: Tajemnicza liczba e i inne sekrety matematyki. Warszawa: Wydawnictwa Naukowo-Techniczne, 1989, s. 164. ISBN 83-204-0920-9.
Bibliografia[edytuj | edytuj kod]
- Igor N. Bronsztejn, Konstantin A. Siemiendiajew: Matematyka, poradnik encyklopedyczny. Wyd. VI. Warszawa: Państwowe Wydawnictwo Naukowe, 1976.
- Lidia Filist, Artur Malina, Alicja Solecka: Słownik encyklopedyczny – matematyka. Wydawnictwo Europa, 1998. ISBN 83-85336-06-0.
- Franciszek Leja: Funkcje zespolone. Warszawa: PWN, 1976.
- Franciszek Leja: Rachunek różniczkowy i całkowy ze wstępem do równań różniczkowych. Wyd. III. Warszawa: PWN, 1954.
- Fritz Reinhardt, Heinrich Soeder: Atlas matematyki. Warszawa: Prószyński i S-ka, 2006. ISBN 83-7469-189-1.
Linki zewnętrzne[edytuj | edytuj kod]
- Jarosław Górnicki, Sinus i cosinus w akcji, [w:] pismo „Delta”, deltami.edu.pl, luty 2022, ISSN 0137-3005 [dostęp 2023-12-10] (pol.).